Ein Schrittmotor ist ein Elektromotor, der elektrische Energie in mechanische Energie umwandelt, und sein Ausgangsdrehmoment und seine Drehzahl können durch Steuerung der Stromversorgung präzise geregelt werden.
Ich, die Vorteile von Schrittmotoren
Hohe Präzision
Der Drehwinkel des Schrittmotors ist proportional zur Anzahl der Eingangsimpulse. Dadurch lassen sich Anzahl und Frequenz der Impulse präzise steuern, um Position und Drehzahl des Motors genau zu regeln. Diese Eigenschaft macht Schrittmotoren ideal für Anwendungen, die eine hochpräzise Positionierung erfordern, wie beispielsweise CNC-Werkzeugmaschinen, Druckmaschinen und Textilmaschinen.
Schrittmotoren weisen üblicherweise eine Genauigkeit von 3 % bis 5 % pro Schritt auf und akkumulieren keine Fehler vom vorherigen zum nächsten Schritt, d. h. sie erzeugen keine kumulativen Fehler. Dies bedeutet, dass Schrittmotoren über lange Zeiträume oder bei kontinuierlicher Bewegung eine hohe Positionsgenauigkeit und Bewegungswiederholbarkeit gewährleisten können.
Hochgradig kontrollierbar

Der Betrieb von Schrittmotoren erfolgt durch Steuerung des Impulsstroms, wodurch die Motorsteuerung per Softwareprogrammierung realisiert werden kann. Dank dieser Programmierbarkeit eignen sich Schrittmotoren für ein breites Anwendungsspektrum, beispielsweise in automatisierten Produktionslinien, der Robotik und anderen Bereichen.
Da die Reaktion des Schrittmotors ausschließlich vom Eingangsimpuls abhängt, kann eine Regelung im offenen Regelkreis eingesetzt werden. Dies vereinfacht die Motorstruktur und senkt die Ansteuerungskosten. Zudem reduziert die Regelung im offenen Regelkreis die Systemkomplexität und die Wartungskosten.
Hohes Drehmoment bei niedrigen Drehzahlen
Schrittmotoren zeichnen sich durch ein hohes Drehmoment bei niedrigen Drehzahlen aus, wodurch sie sich hervorragend für Anwendungen eignen, die eine niedrige Drehzahl und ein hohes Drehmoment erfordern, wie beispielsweise automatische Etikettiermaschinen und Verpackungsmaschinen.
Schrittmotoren haben ihr maximales Drehmoment im Stillstand, eine Eigenschaft, die sie in Anwendungen vorteilhaft macht, bei denen Positionsstabilität oder Widerstandsfähigkeit gegenüber externen Lasten erforderlich ist.
Hohe Zuverlässigkeit

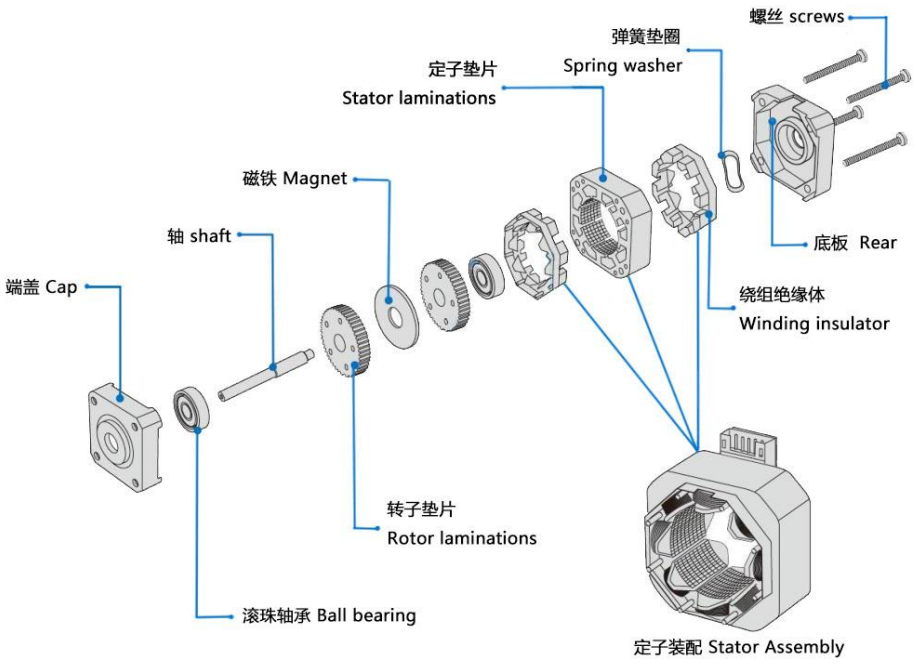
Schrittmotoren besitzen keine Bürsten, wodurch Fehlfunktionen und Geräusche durch Bürstenverschleiß reduziert werden. Dies macht Schrittmotoren äußerst zuverlässig, wobei die Lebensdauer des Motors maßgeblich von der Lebensdauer der Lager abhängt.
Schrittmotoren haben einen einfachen Aufbau, der aus drei Teilen besteht: dem Motor selbst, dem Treiber und dem Controller, was die Installation und Wartung relativ einfach macht.
Breiter Geschwindigkeitsbereich

Schrittmotoren verfügen über einen relativ großen Drehzahlbereich, und ihre Drehzahl lässt sich durch Anpassen der Pulsfrequenz verändern. Dadurch kann sich der Schrittmotor an unterschiedliche Arbeitsgeschwindigkeiten und Lastanforderungen anpassen.
Gutes Ansprechverhalten beim Anfahren, Stoppen und Rückwärtsfahren
Schrittmotoren reagieren beim Starten und Stoppen schnell auf Steuersignale und gewährleisten auch beim Umkehren eine hohe Präzision und Stabilität. Diese Eigenschaft macht Schrittmotoren besonders vorteilhaft für Anwendungen, die häufiges Starten, Stoppen und Umkehren erfordern.
II. Die Nachteile von Schrittmotoren
Leicht, den Schritt zu verlieren oder zu übertreten.
Werden Schrittmotoren nicht ordnungsgemäß gesteuert, können sie zu Schrittabweichungen oder Überschreitungen neigen. Eine Schrittabweichung bedeutet, dass der Motor nicht die vorgegebene Schrittzahl erreicht, während eine Überschreitung der vorgegebenen Schrittzahl bedeutet, dass er mehr Schritte ausführt. Beide Phänomene führen zu einem Verlust der Positionsgenauigkeit des Motors und beeinträchtigen die Systemleistung.
Das Auftreten von Schrittabweichungen und Überschwingen hängt von Faktoren wie der Motorlast, der Drehzahl sowie der Frequenz und Amplitude des Steuersignals ab. Daher müssen diese Faktoren beim Einsatz von Schrittmotoren sorgfältig berücksichtigt und geeignete Maßnahmen ergriffen werden, um Schrittabweichungen und Überschwingen zu vermeiden.
Schwierigkeiten beim Erreichen hoher Drehzahlen
Die Drehzahl eines Schrittmotors ist durch sein Funktionsprinzip begrenzt, und es ist in der Regel schwierig, eine hohe Drehzahl zu erreichen. Zwar lässt sich die Motordrehzahl durch Erhöhung der Steuersignalfrequenz steigern, doch führt eine zu hohe Frequenz zu Problemen wie Motorüberhitzung, verstärkter Geräuschentwicklung und kann den Motor sogar beschädigen.
Daher ist es bei der Verwendung von Schrittmotoren notwendig, den geeigneten Drehzahlbereich entsprechend den Anwendungsanforderungen auszuwählen und einen Betrieb mit hohen Drehzahlen über längere Zeiträume zu vermeiden.
Reagiert empfindlich auf Laständerungen
Schrittmotoren benötigen während des Betriebs eine Echtzeitsteuerung von Anzahl und Frequenz der Stromimpulse, um eine präzise Positions- und Geschwindigkeitsregelung zu gewährleisten. Bei großen Laständerungen wird der Steuerstromimpuls jedoch gestört, was zu instabilen Bewegungen und sogar unkontrollierten Schritten führen kann.
Zur Lösung dieses Problems kann ein geschlossener Regelkreis eingesetzt werden, der Position und Drehzahl des Motors überwacht und das Steuersignal entsprechend der jeweiligen Situation anpasst. Dies erhöht jedoch die Komplexität und die Kosten des Systems.
Geringer Wirkungsgrad
Da Schrittmotoren ständig zwischen Anhalten und Anfahren gesteuert werden, ist ihr Wirkungsgrad im Vergleich zu anderen Motortypen (z. B. Gleichstrommotoren, Wechselstrommotoren usw.) relativ gering. Das bedeutet, dass Schrittmotoren für die gleiche Ausgangsleistung mehr Energie verbrauchen.
Zur Verbesserung der Effizienz von Schrittmotoren können Maßnahmen wie die Optimierung von Steuerungsalgorithmen und die Reduzierung von Motorverlusten eingesetzt werden. Die Umsetzung dieser Maßnahmen erfordert jedoch einen gewissen technologischen Aufwand und entsprechende Investitionen.
III. Anwendungsbereich von Schrittmotoren:
Schrittmotoren finden aufgrund ihrer einzigartigen Vorteile und gewissen Einschränkungen in vielen Bereichen breite Anwendung. Im Folgenden wird der Anwendungsbereich von Schrittmotoren detailliert erläutert:
Robotik- und Automatisierungssysteme
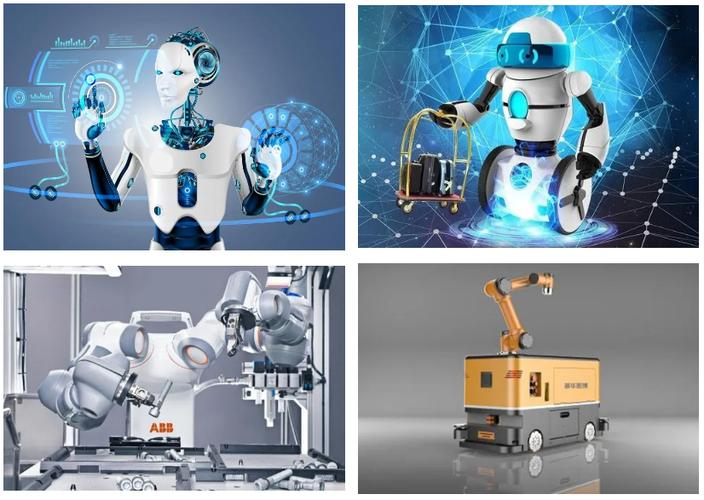
Schrittmotoren finden breite Anwendung in Industrierobotern, automatisierten Produktionslinien und anderen Bereichen. Sie ermöglichen die präzise Steuerung von Bewegungsgeschwindigkeit und -richtung von Robotern und gewährleisten hochpräzise Positionierung sowie schnelle Reaktionszeiten in automatisierten Produktionsprozessen.
CNC-Werkzeugmaschinen

Drucker

Schrittmotoren steuern die Bewegung des Druckkopfs in Geräten wie Tintenstrahl- und Laserdruckern. Durch die präzise Steuerung der Motorbewegung lässt sich ein hochwertiger Text- und Bilddruck realisieren. Diese Eigenschaft macht Schrittmotoren in Druckgeräten weit verbreitet.
Medizinprodukte

Schrittmotoren werden in medizinischen Bildgebungsgeräten (z. B. Röntgengeräten, CT-Scannern usw.) eingesetzt, um die Bewegung des Scanrahmens anzutreiben. Durch die präzise Steuerung der Motorbewegung lässt sich eine schnelle und genaue Bildgebung des Patienten realisieren. Diese Eigenschaft verleiht Schrittmotoren eine wichtige Rolle in der Medizintechnik.
Luft- und Raumfahrt

Schrittmotoren werden zur Steuerung von Aktuatoren in Luft- und Raumfahrtanlagen wie Satellitenlageregelungssystemen und Raketenantrieben eingesetzt. Sie zeichnen sich durch hohe Präzision und Stabilität aus und sind daher ein wichtiger Bestandteil der Luft- und Raumfahrt.
Unterhaltungs- und Spielgeräte

Schrittmotoren werden zur Steuerung der Bewegung von Aktuatoren in Geräten wie Lasergravierern, 3D-Druckern und Gamecontrollern eingesetzt. In diesen Geräten ist die präzise Steuerung der Schrittmotoren entscheidend für ein qualitativ hochwertiges Produkt und ein optimales Benutzererlebnis.
Bildung und Forschung

Schrittmotoren werden zur Steuerung von experimentellen Plattformen in Bereichen wie Laborinstrumenten und Lehrmitteln eingesetzt. Im Bildungsbereich sind sie aufgrund ihrer geringen Kosten und hohen Genauigkeit ideale Lehrmittel. Durch die präzise Steuerung von Schrittmotoren können sie Schülern und Studierenden helfen, physikalische und ingenieurwissenschaftliche Prinzipien besser zu verstehen.
Zusammenfassend bieten Schrittmotoren Vorteile wie hohe Präzision, gute Steuerbarkeit, niedrige Drehzahl und hohes Drehmoment sowie hohe Zuverlässigkeit. Allerdings weisen sie auch Nachteile wie die Anfälligkeit für Schrittabweichungen, Schwierigkeiten beim Erreichen hoher Drehzahlen, Empfindlichkeit gegenüber Laständerungen und einen geringen Wirkungsgrad auf. Bei der Auswahl von Schrittmotoren müssen daher deren Vor- und Nachteile sowie der Anwendungsbereich entsprechend den jeweiligen Anforderungen berücksichtigt werden, um die Leistungsfähigkeit und Stabilität des Systems zu gewährleisten.
Veröffentlichungsdatum: 14. November 2024