Ein Schneckengetriebe besteht aus einer Schnecke und einem Schneckenrad, wobei die Schnecke in der Regel das aktive Element ist. Schneckengetriebe besitzen sowohl Rechts- als auch Linksgewinde und werden daher als Rechts- bzw. Linksgewinde bezeichnet. Eine Schnecke ist ein Zahnrad mit einem oder mehreren schrägverzahnten Zähnen, das mit dem Schneckenrad ineinandergreift und so ein versetztes Zahnradpaar bildet. Die Eingriffsfläche kann zylindrisch, konisch oder kreisförmig sein. Man unterscheidet vier Schneckentypen: die Archimedische Schnecke, die Evolventenschnecke, die Schnecke mit geradem Profil und die konische, zylindrische Schnecke.
Vorteile des Schneckengetriebes.
✦ Das einstufige Übertragungsverhältnis ist groß, im Allgemeinen i=10~100. Im Indexierungsmechanismus für die Kraftübertragung kann der Maximalwert über 1500 liegen.
✦ Die gleiche Verzahnung ist ein linearer Kontakt, der hohen Leistungen standhält.
✦ Kompakte Bauweise, reibungslose Kraftübertragung und geringe Geräuschentwicklung.
✦ Wenn der Hubwinkel der Schnecke kleiner ist als der entsprechende Reibungswinkel zwischen den Zahnrädern, ist sie selbsthemmend mit Gegenhub, d. h. nur die Schnecke kann das Schneckenrad antreiben, nicht das Schneckenrad.
Nachteile des Schneckengetriebes.
✦Bei zwei senkrecht zueinander stehenden Achsen ist die lineare Geschwindigkeit der beiden Radknotenpunkte senkrecht zueinander, wodurch die relative Gleitgeschwindigkeit groß ist und es leicht zu Überhitzung und Verschleiß kommt.
✦Geringe Effizienz, im Allgemeinen 0,7 bis 0,8; Schneckengetriebe mit selbsthemmenden Schneckenrädern sind noch weniger effizient, im Allgemeinen weniger als 0,5.
Tut einSchneckengetriebe-SchrittmotorMüssen sie zwangsläufig eine Selbstverriegelungsfunktion aufweisen?
Nein, es gibt Voraussetzungen. Wenn der Vorlaufwinkel kleiner als der Reibungswinkel ist, dann …Schneckengetriebe-Schrittmotorkann selbstverriegelnd sein.
Normalerweise muss bei der Auswahl eines Getriebemotors ein Stromausfallschutz oder ein Bremsmotor verwendet werden. Daher wird der Getriebemotor mit Bremse ausgewählt, um den Anhaltevorgang zu ermöglichen. Dies bedeutet jedoch keinen absoluten Stillstand, da noch eine geringe Trägheit vorhanden ist.
Was ist Selbstverriegelung?Das Prinzip der Selbsthemmung beruht darauf, dass die Maschine unabhängig von Kraftaufwand und Trägheit nicht anläuft. Sobald der aktive Teil aufhört zu laufen, bremst die gesamte Maschine. Schrittmotoren mit Schneckengetriebe weisen diese Selbsthemmung auf. Getriebemotoren hingegen besitzen keine Selbsthemmung. Schneckengetriebe mit Untersetzungsverhältnissen von 1:30 und höher bieten eine zuverlässige Selbsthemmung, wobei die Selbsthemmung mit zunehmendem Untersetzungsverhältnis zunimmt.
Wie wählt man das Untersetzungsverhältnis, um die Selbsthemmungsfunktion des Schneckengetriebe-Schrittmotors zu gewährleisten?
1. Der Reibungskoeffizient des Schneckengetriebes beträgt 0,6, der Führungswinkel des Schneckengetriebes ist kleiner als 3°29′11″, was einer Selbsthemmung entspricht, und umgekehrt.
2. Der Reibungskoeffizient des Schneckengetriebes beträgt 0,7, der Führungswinkel des Schneckengetriebes ist kleiner als 4°03′57″, was einer Selbsthemmung entspricht, und umgekehrt.
3. Wenn der Reibungskoeffizient des Schneckenrades 0,8 beträgt, ist der Steigungswinkel der Schnecke kleiner als 4°38′39″, d. h. sie ist selbsthemmend, und umgekehrt.
Wenn der Steigungswinkel der Schnecke kleiner ist als der entsprechende Reibungswinkel zwischen den Zähnen des kämmenden Schneckenrades, verfügt der Untersetzungs-Schrittmotor über eine Selbsthemmung. Diese kann sogar eine umgekehrte Selbsthemmung bewirken, d. h. nur die Schnecke treibt das Schneckenrad an, nicht aber umgekehrt. Im Konstruktionswesen von Schwermaschinen bevorzugen Konstrukteure in der Regel selbsthemmende Schneckengetriebe, da deren umgekehrte Selbsthemmung eine wichtige Rolle für die Sicherheit spielt.
Berechnungsformel für Schneckenrad und Schneckengetriebe.
1. Übersetzungsverhältnis = Anzahl der Zähne des Schneckenrads ÷ Anzahl der Schneckenköpfe
2. Achsabstand = (Teilung des Schneckenrads + Teilung des Schneckengetriebes) ÷ 2
3. Schneckenraddurchmesser = (Zähnezahl + 2) × Modul
4. Schneckenradteilung = Modul × Zähnezahl
5. Schneckensteigung = Schneckenaußendurchmesser - 2 × Modul
6. Wurmführung = π × Modul × Kopf
7. Helixwinkel (Führungswinkel) tgB = (Modul × Kopfnummer) ÷ Schneckensteigung
8. Schneckenleitung = π × Modul × Kopf
9. Modul = Durchmesser des Teilkreises / Anzahl der Zähne
Die Anzahl der Schneckenköpfe: einköpfige Schnecke (die Schnecke hat nur eine Helix, d. h. die Schnecke dreht sich eine Woche lang und das Schneckenrad dreht sich durch einen Zahn); doppelköpfige Schnecke (die Schnecke hat zwei Helices, d. h. die Schnecke dreht sich eine Woche lang und das Schneckenrad dreht sich durch zwei Zähne).
Der Elastizitätsmodul beschreibt die Größe der Helix an der Schraube; je größer der Elastizitätsmodul, desto größer die Helix an der Schraube.
Der Durchmesserfaktor entspricht der Dicke der Schraube.
Modul: Der Teilkreis eines Zahnrads dient als Bezugspunkt für die Konstruktion und Berechnung der Abmessungen jedes einzelnen Zahnradteils. Der Umfang des Teilkreises beträgt πd = zp, daher ist der Durchmesser des Teilkreises
d=zp/π
Da π in der obigen Gleichung eine irrationale Zahl ist, eignet es sich nicht zur Positionierung des Indexkreises als Bezugspunkt. Um Berechnung, Fertigung und Prüfung zu vereinfachen, wird das Verhältnis p/π nun künstlich auf einfache Werte festgelegt und als Modul (Modul) bezeichnet, abgekürzt m.
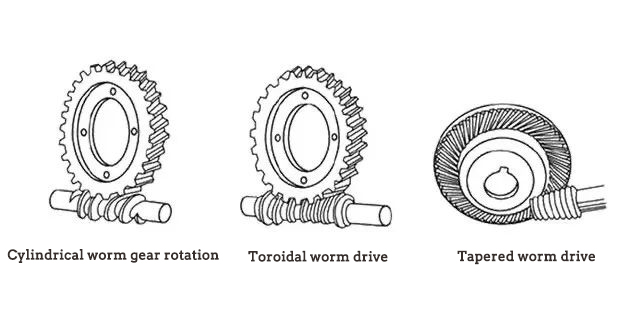
Arten von Schneckengetrieben
Je nach Form des Schneckengetriebes unterscheidet man zwischen zylindrischen, ringförmigen und konischen Schneckengetrieben. Das zylindrische Schneckengetriebe ist dabei die am weitesten verbreitete Variante.
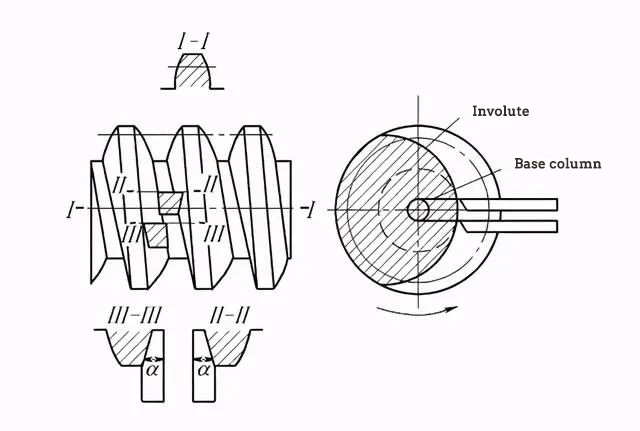
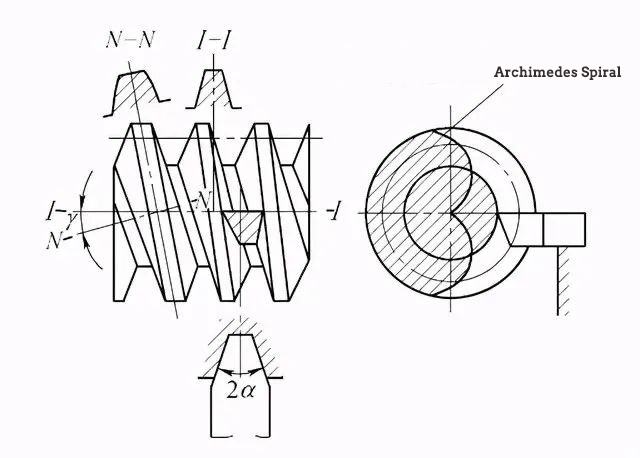
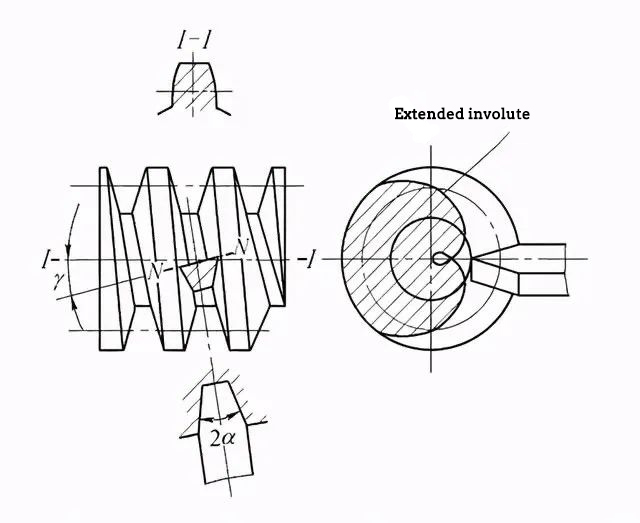
Gewöhnliche zylindrische Schneckenräder werden meist auf der Drehmaschine mit einem Drehmeißel mit gerader Schneide gefertigt. Durch Variation der Werkzeugaufnahme und des verwendeten Werkzeugs lassen sich vier Schneckenradtypen mit unterschiedlichen Zahnprofilen im Querschnitt der vertikalen Achse herstellen: Evolventen-Schneckenräder (Typ ZI), Archimedische Schneckenräder (Typ ZA), Schneckenräder mit geradem Zahnprofil (Typ ZN) und konische zylindrische Schneckenräder (Typ ZK).
Eingeweideter Wurm (ZI-Typ)- Die Schaufelebene ist tangential zum Schneckenfußzylinder, und die Endverzahnung ist Evolventenverzahnung, geeignet für höhere Drehzahlen und größere Leistungen.
Archimedischer Wurm (Typ ZA)- Das Zahnprofil senkrecht zur Achsenebene ist ein archimedisches Schraubenprofil, und das Zahnprofil in der Ebene jenseits der Achse ist gerade, einfache Bearbeitung und geringe Genauigkeit. (Schneckenrad mit axial geradem Profil).
Normaler gerader Profilwurm (ZN)- kann zum Schleifen von Zähnen mit modifizierter Schleifscheibe verwendet werden, die Bearbeitung ist einfach, wird häufig für mehrköpfige Schnecken eingesetzt, Übertragungswirkungsgrad bis zu 0,9.
Da Sie ein grundlegendes Verständnis des Getriebes besitzen, ...Prinzip vonSchneckengetriebemotorenFalls Sie noch etwas mitteilen möchten, bitteKontaktieren Sie uns!
Wir pflegen einen engen Kontakt zu unseren Kunden, hören auf ihre Bedürfnisse und setzen ihre Wünsche um. Wir sind überzeugt, dass Produktqualität und Kundenservice die Grundlage einer für beide Seiten vorteilhaften Partnerschaft bilden.
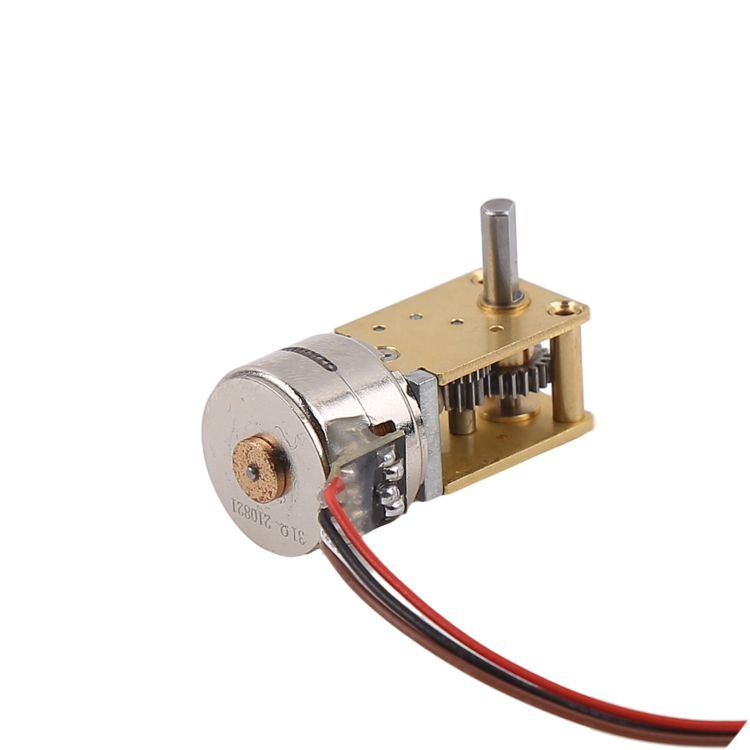
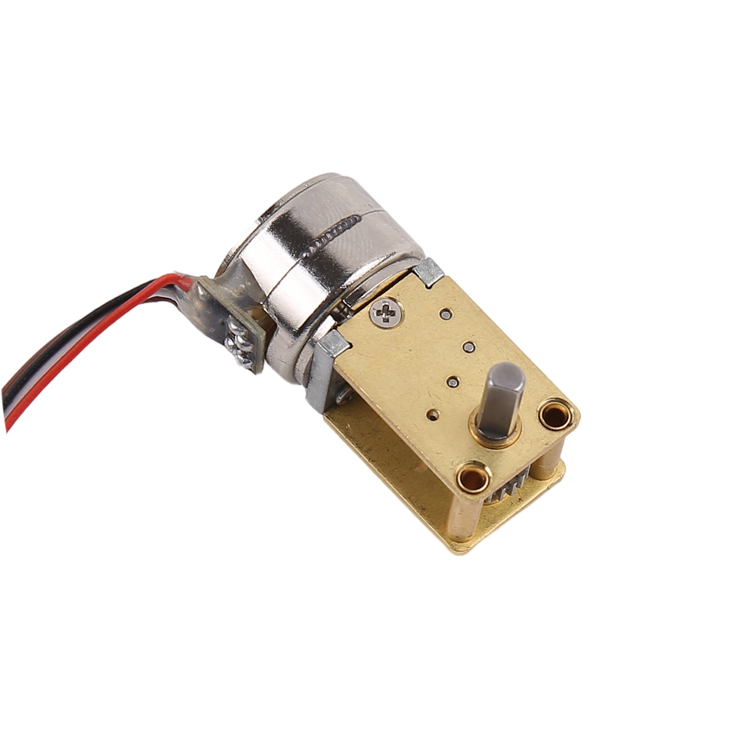
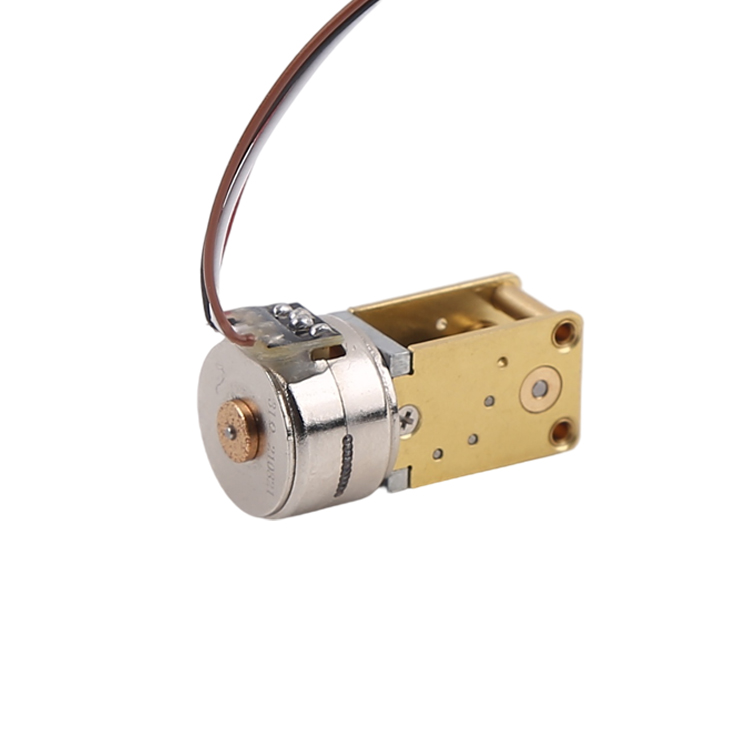
Changzhou Vic-tech Motor Technology Co., Ltd. ist ein professionelles Forschungs- und Produktionsunternehmen mit Schwerpunkt auf Motorenentwicklung, Komplettlösungen für Motoranwendungen sowie der Verarbeitung und Produktion von Motorenprodukten. Seit 2011 ist das Unternehmen auf die Herstellung von Mikromotoren und Zubehör spezialisiert. Zu unseren Hauptprodukten zählen Miniatur-Schrittmotoren, Getriebemotoren, Unterwasserantriebe sowie Motortreiber und -steuerungen.

Unser Team verfügt über mehr als 20 Jahre Erfahrung in der Entwicklung und Fertigung von Mikromotoren und kann Produkte entwickeln und Kunden bei der Entwicklung nach ihren individuellen Anforderungen unterstützen. Derzeit beliefern wir Kunden in Hunderten von Ländern in Asien, Nordamerika und Europa, darunter die USA, Großbritannien, Korea, Deutschland, Kanada und Spanien. Unsere Geschäftsphilosophie, die auf Integrität, Zuverlässigkeit und Qualitätsorientierung basiert, sowie unsere Kundenorientierung fördern leistungsorientierte Innovation, Zusammenarbeit und Effizienz. Unser Ziel ist es, durch gemeinsames Handeln maximalen Mehrwert für unsere Kunden zu schaffen.
Veröffentlichungsdatum: 30. Januar 2023