Schneckengetriebe bestehen aus einer Schnecke und einem Schneckenrad, wobei die Schnecke in der Regel das aktive Teil ist. Das Schneckenrad hat die gleichen Rechts- und Linksgewinde, die als Rechts- bzw. Linksschneckenräder bezeichnet werden. Eine Schnecke ist ein Zahnrad mit einem oder mehreren Schrägzähnen, die mit dem Schneckenrad kämmen und so ein versetztes Wellenzahnradpaar bilden. Die Indexierungsfläche kann zylindrisch, konisch oder kreisförmig sein. Es gibt vier Kategorien: Archimedische Schnecke, Evolventenschnecke, normale Schnecke mit geradem Profil und konisch umhüllende zylindrische Schnecke.
Vorteile des Schneckengetriebes.
✦ Das einstufige Übersetzungsverhältnis ist groß, im Allgemeinen i = 10 bis 100. Beim Indexierungsmechanismus zur Kraftübertragung kann das Maximum über 1500 liegen.
✦ Die gleiche Verzahnung ist ein linearer Kontakt, der großer Kraft standhalten kann.
✦ Kompakte Struktur, reibungslose Übertragung und geringe Geräuschentwicklung.
✦ Wenn der Hubwinkel der Schnecke kleiner ist als der entsprechende Reibungswinkel zwischen den Zahnrädern, ist sie selbsthemmend mit Gegenhub, d. h., nur die Schnecke kann das Schneckenrad antreiben, nicht das Schneckenrad.
Nachteile des Schneckengetriebes.
✦Bei zwei senkrechten Achsen ist die lineare Geschwindigkeit der beiden Radknoten senkrecht, sodass die relative Gleitgeschwindigkeit groß ist und es leicht zu Erwärmung und Verschleiß kommt.
✦Niedriger Wirkungsgrad, im Allgemeinen 0,7 bis 0,8; Schneckengetriebe mit selbsthemmenden Schneckengetrieben haben einen noch geringeren Wirkungsgrad, im Allgemeinen weniger als 0,5.
Hat einSchneckengetriebe-Schrittmotorunbedingt eine Selbsthemmung aufweisen?
Nein, es gibt Voraussetzungen. Wenn der Steigungswinkel < Reibungswinkel ist,Schneckengetriebe-Schrittmotorkann selbsthemmend sein.
Normalerweise muss der Benutzer bei der Auswahl eines Schrittmotors mit Untersetzungsgetriebe einen Stromausfallschutz oder eine Motorbremse verwenden. Daher wird der Motor mit Untersetzungsgetriebe mit einer Bremse ausgewählt, um den Stoppzweck zu erreichen. Dies bedeutet jedoch nicht, dass er absolut stoppt, da immer noch eine geringe Trägheit vorhanden ist.
Was ist Selbsthemmung?Das Konzept der Selbsthemmung besteht darin, dass unabhängig von der Kraft, die nicht gestartet werden kann, und der Trägheit die gesamte Maschine gebremst werden kann, solange die Arbeit des aktiven Teils gestoppt wird. Der Schrittmotor mit Schneckengetriebe verfügt über diese Selbsthemmung. Schrittmotoren mit Getriebe weisen keine Selbsthemmung auf, während Schneckengetriebe mit einem Übersetzungsverhältnis von 1:30 und mehr eine zuverlässige Selbsthemmung aufweisen. Je größer das Untersetzungsverhältnis, desto besser die Selbsthemmung.
Wie wählt man das Untersetzungsverhältnis, um die Selbsthemmung des Schneckengetriebe-Schrittmotors sicherzustellen?
1. Der Reibungskoeffizient des Schneckengetriebes beträgt 0,6, der Führungswinkel des Schneckengetriebes beträgt weniger als 3°29′11″, was eine Selbsthemmung bedeutet, und umgekehrt.
2. Der Reibungskoeffizient des Schneckengetriebes beträgt 0,7, der Führungswinkel des Schneckengetriebes beträgt weniger als 4°03′57″, was eine Selbsthemmung bedeutet, und umgekehrt.
3. Wenn der Reibungskoeffizient des Schneckenrads 0,8 beträgt, ist der Steigungswinkel der Schnecke kleiner als 4°38′39″, d. h. sie ist selbsthemmend, und umgekehrt.
Wenn der Steigungswinkel der Schnecke kleiner ist als der entsprechende Reibungswinkel zwischen den Zähnen des Eingriffsrads, ist der Reduktionsschrittmotormechanismus selbsthemmend, wodurch eine umgekehrte Selbsthemmung erreicht werden kann, d. h. nur die Schnecke kann das Schneckenrad antreiben, nicht jedoch das Schneckenrad. Im Allgemeinen neigen Konstrukteure bei der Konstruktion schwerer Maschinen dazu, den Schneckengetriebemechanismus mit Selbsthemmung zu verwenden, da seine umgekehrte Selbsthemmung eine sehr wichtige Rolle für den Sicherheitsschutz spielen kann.
Berechnungsformel für Schneckenrad und Schneckengetriebe.
1. Übersetzungsverhältnis = Anzahl der Schneckenzähne ÷ Anzahl der Schneckenköpfe
2、Achsabstand = (Schneckenradsteigung + Schneckenradsteigung) ÷ 2
3、Schneckenraddurchmesser = (Anzahl der Zähne + 2) × Modul
4. Schneckenradsteigung = Modul × Anzahl der Zähne
5. Schneckensteigung = Schneckenaußendurchmesser - 2 × Modul
6、Schneckenführung = π×Modul×Kopf
7. Schrägungswinkel (Führungswinkel) tgB = (Modul × Kopfnummer) ÷ Schneckensteigung
8、Schneckenleitung=π×Modul×Kopf
9、Modul = Durchmesser des Teilkreises/Anzahl der Zähne
Die Anzahl der Schneckenköpfe: einköpfige Schnecke (die Schnecke hat nur eine Wendel, d. h. die Schnecke dreht sich eine Woche lang und das Schneckenrad dreht sich um einen Zahn); doppelköpfige Schnecke (die Schnecke hat zwei Wendel, d. h. die Schnecke dreht sich eine Woche lang und das Schneckenrad dreht sich um zwei Zähne).
Der Modul ist die Größe der Spirale auf der Schraube, d. h. je größer der Modul, desto größer die Spirale auf der Schraube.
Der Durchmesserfaktor ist die Dicke der Schraube.
Modul: Der Teilkreis eines Zahnrads ist der Maßstab für die Konstruktion und Berechnung der Abmessungen jedes Teils des Zahnrads, und der Umfang des Teilkreises des Zahnrads = πd = zp, also der Durchmesser des Teilkreises
d=zp/π
Da π in der obigen Gleichung eine irrationale Zahl ist, ist die Positionierung des Indexkreises als Referenz nicht praktisch. Um Berechnung, Herstellung und Prüfung zu erleichtern, wird das Verhältnis p/π nun künstlich durch einige einfache Werte angegeben und als Modul (m) ausgedrückt.
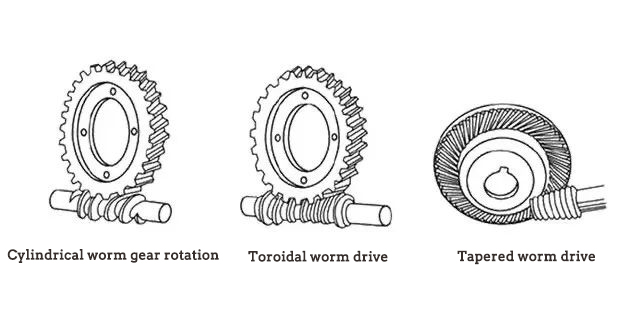
Arten von Schneckengetrieben
Je nach Schneckenform kann man zwischen zylindrischen Schneckenantrieben, ringförmigen Schneckenantrieben und konischen Schneckenantrieben unterscheiden. Unter diesen ist der zylindrische Schneckenantrieb am weitesten verbreitet.
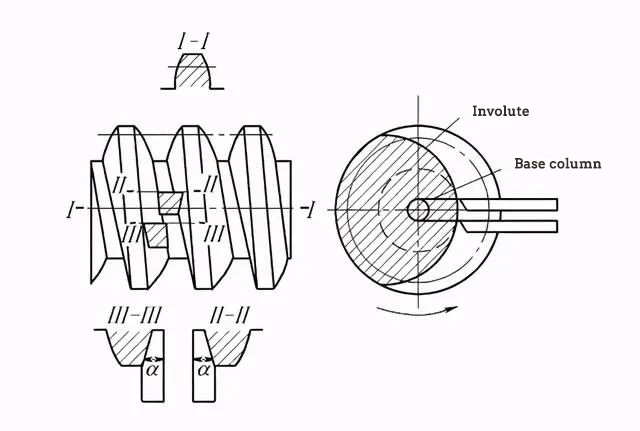
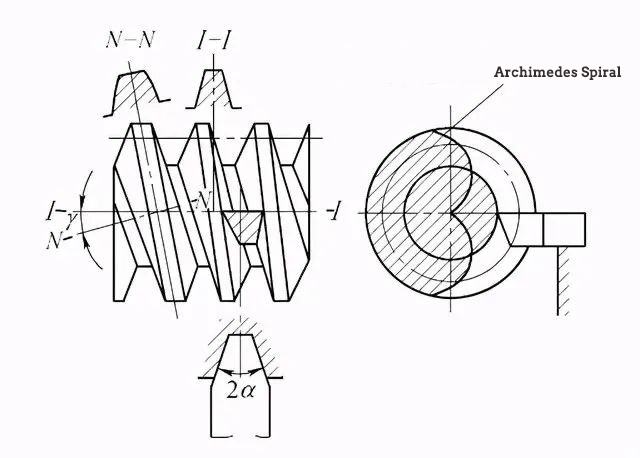
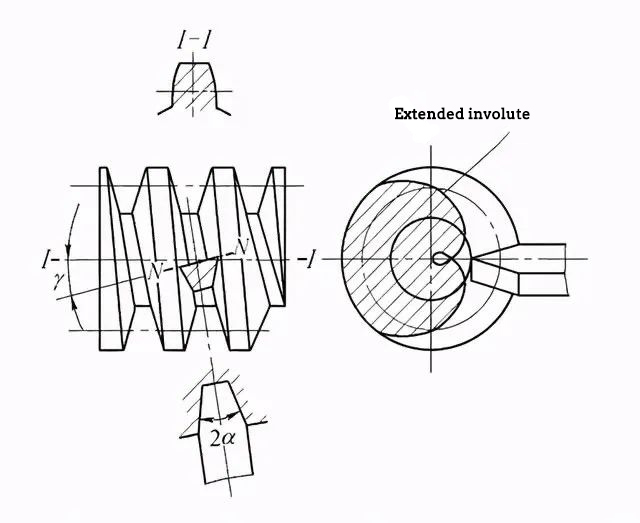
Gewöhnliche zylindrische Schneckenräder werden meist auf der Drehbank mit einem Drehmeißel mit gerader Schneide gefertigt. Durch Variation der Werkzeuginstallationsposition und des verwendeten Werkzeugs können vier Arten von Schneckenrädern mit unterschiedlichen Zahnprofilen im Querschnitt der vertikalen Achse hergestellt werden: Evolventenschneckenräder (Typ ZI), Archimedes-Schneckenräder (Typ ZA), normale Schneckenräder mit geradem Profil (ZN) und konische Hüll-Zylinderschneckenräder (ZK).
Evolventenschnecke (ZI-Typ)- Die Blattebene ist tangential zum Zylinder der Schneckenbasis und die Endzähne sind Evolventen, geeignet für höhere Geschwindigkeiten und größere Leistung.
Archimedischer Wurm (Typ ZA)- Das Zahnprofil senkrecht zur Achsenebene ist eine archimedische Schraube, und das Zahnprofil in der Ebene hinter der Achse ist gerade, einfache Verarbeitung und geringe Genauigkeit. (Schneckenrad mit axial geradem Profil).
Normale Schnecke mit geradem Profil (ZN)- kann zum Schleifen von Zähnen mit modifizierter Schleifscheibe verwendet werden, die Verarbeitung ist einfach, wird oft für Mehrkopfschnecken verwendet, Übertragungseffizienz bis zu 0,9.
Da Sie ein kurzes Verständnis der Übertragung habenPrinzip derSchneckengetriebemotoren, wenn Sie uns sonst noch etwas mitteilen möchten,Kontakt!
Wir arbeiten eng mit unseren Kunden zusammen, hören ihnen zu und gehen auf ihre Wünsche ein. Wir sind überzeugt, dass Produktqualität und Kundenservice die Grundlage einer Win-Win-Partnerschaft sind.
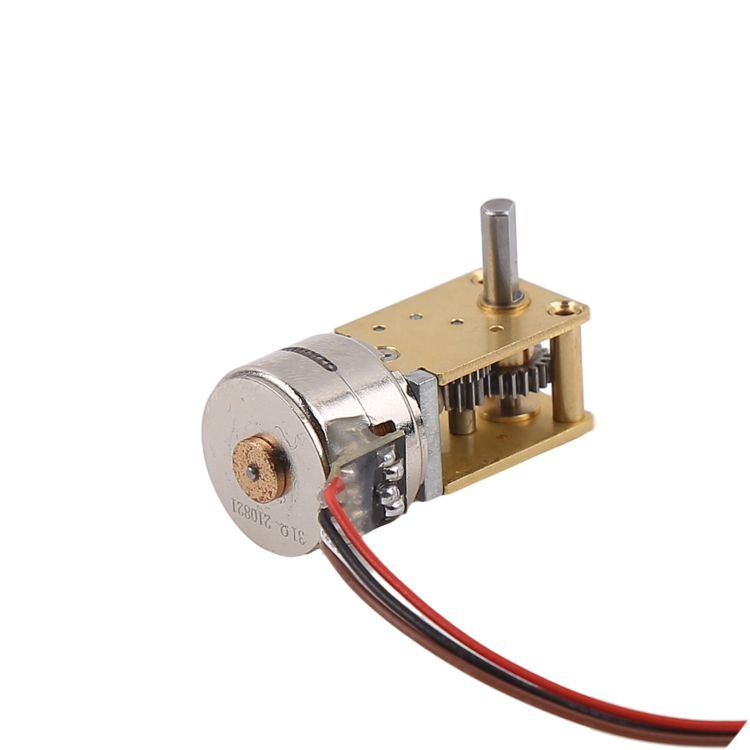
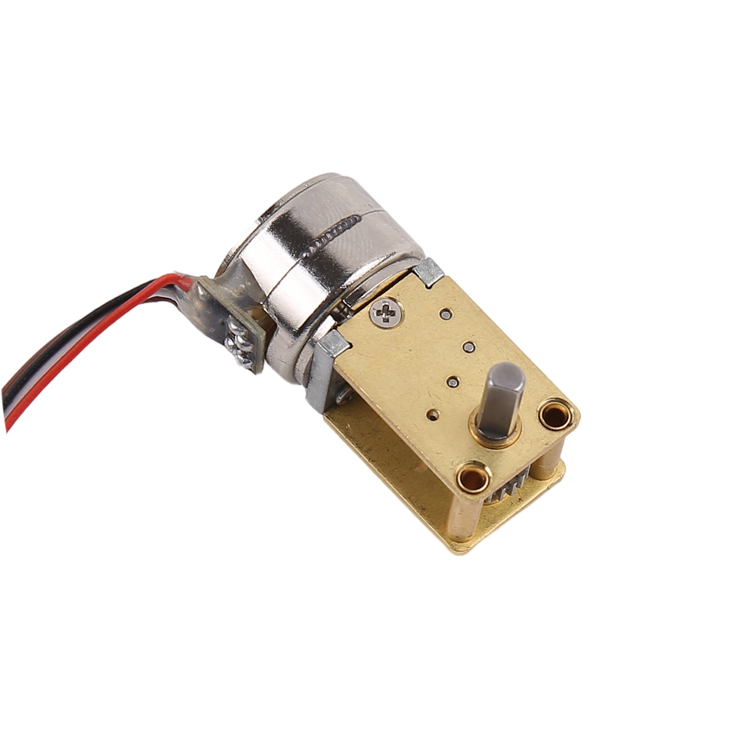
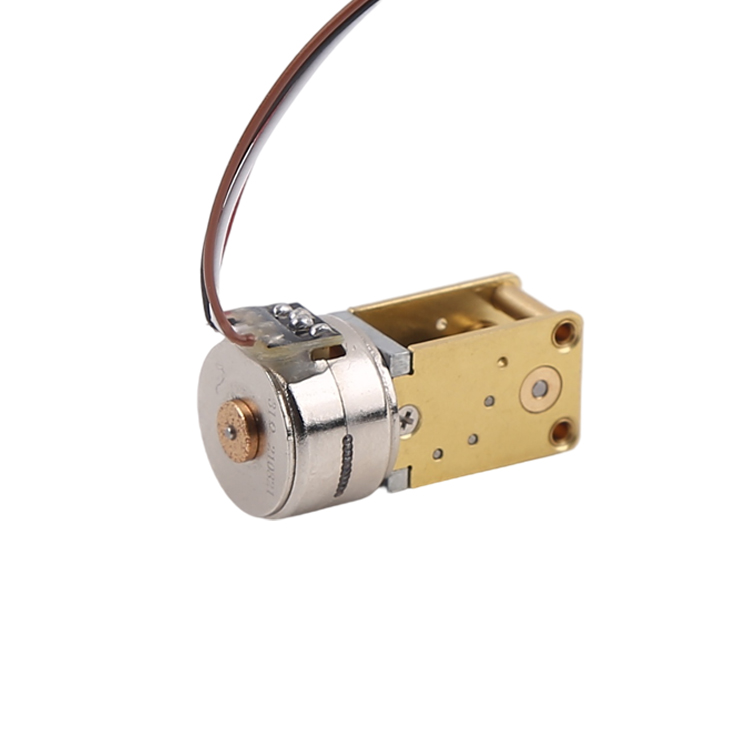
Changzhou Vic-tech Motor Technology Co., Ltd. ist ein professionelles Forschungs- und Produktionsunternehmen mit Schwerpunkt auf Motorenforschung und -entwicklung, Gesamtlösungen für Motoranwendungen sowie der Verarbeitung und Produktion von Motorprodukten. Ltd. ist seit 2011 auf die Herstellung von Mikromotoren und Zubehör spezialisiert. Unsere Hauptprodukte: Miniatur-Schrittmotoren, Getriebemotoren, Unterwasserstrahlruder sowie Motortreiber und -steuerungen.

Unser Team verfügt über mehr als 20 Jahre Erfahrung in der Konstruktion, Entwicklung und Herstellung von Mikromotoren und kann Produkte entwickeln und Designkunden entsprechend den speziellen Anforderungen unterstützen! Derzeit verkaufen wir hauptsächlich an Kunden in Hunderten von Ländern in Asien, Nordamerika und Europa, wie z. B. den USA, Großbritannien, Korea, Deutschland, Kanada, Spanien usw. Unsere Geschäftsphilosophie „Integrität und Zuverlässigkeit, qualitätsorientiert“ und unsere Wertenormen „Kunde zuerst“ befürworten leistungsorientierte Innovation, Zusammenarbeit und effizienten Unternehmergeist, um ein „Bauen und Teilen“ zu etablieren. Das ultimative Ziel ist es, maximalen Wert für unsere Kunden zu schaffen.
Veröffentlichungszeit: 30. Januar 2023