Geschlossener RegelkreisSchrittmotorenhaben das Leistungs-Kosten-Verhältnis in vielen Bewegungssteuerungsanwendungen verändert. Der Erfolg der VIC-Progressivmotoren mit geschlossenem Regelkreis hat zudem die Möglichkeit eröffnet, teure Servomotoren durch kostengünstige Alternativen zu ersetzen.SchrittmotorenIn einer zunehmenden Anzahl anspruchsvoller industrieller Automatisierungsanwendungen verändern technologische Fortschritte das Kosten-Leistungs-Verhältnis zwischen Schrittmotoren und Servomotoren.
Schrittmotoren versus Servomotoren
Nach gängiger Lehrmeinung eignen sich Servoregelungssysteme besser für Anwendungen, die Drehzahlen über 800 U/min und ein hohes dynamisches Ansprechverhalten erfordern. Schrittmotoren sind hingegen besser geeignet für Anwendungen mit niedrigeren Drehzahlen, geringer bis mittlerer Beschleunigung und hohem Haltemoment.
Worauf basiert also diese gängige Meinung über Schrittmotoren und Servomotoren? Lassen Sie uns dies im Folgenden genauer analysieren.
1. Einfachheit und Kosten
Schrittmotoren sind nicht nur günstiger als Servomotoren, sondern auch einfacher in Betrieb zu nehmen und zu warten. Sie laufen stabil im Stillstand und halten ihre Position (auch unter dynamischen Lasten). Für Anwendungen, die eine höhere Leistung erfordern, müssen jedoch teurere und komplexere Servomotoren eingesetzt werden.
2. Struktur
SchrittmotorenDer Motor dreht sich schrittweise, indem Magnetspulen einen Magneten allmählich von einer Position zur nächsten ziehen. Um den Motor um 100 Positionen in eine beliebige Richtung zu bewegen, sind 100 Schrittbewegungen erforderlich. Schrittmotoren nutzen Impulse für inkrementelle Bewegungen und ermöglichen so eine präzise Positionierung ohne Rückkopplungssensoren.
Die Funktionsweise des Servomotors ist anders. Er verbindet einen Positionssensor – einen Encoder – mit dem Magnetrotor und erfasst kontinuierlich die exakte Position des Motors. Der Servo überwacht die Differenz zwischen der Ist-Position und der Soll-Position und passt den Strom entsprechend an. Dieses geschlossene Regelsystem hält den Motor im korrekten Bewegungszustand.

3. Geschwindigkeit und Drehmoment
Der Leistungsunterschied zwischen Schritt- und Servomotoren beruht auf ihren unterschiedlichen Motorkonstruktionslösungen.SchrittmotorenSchrittmotoren besitzen eine deutlich höhere Polzahl als Servomotoren. Daher sind für eine volle Umdrehung eines Schrittmotors wesentlich mehr Wicklungsströme erforderlich, was bei steigenden Drehzahlen zu einem raschen Drehmomentabfall führt. Zudem kann der Schrittmotor seine Drehzahlsynchronisationsfunktion verlieren, sobald das maximale Drehmoment erreicht ist. Aus diesen Gründen sind Servomotoren in den meisten Hochgeschwindigkeitsanwendungen die bevorzugte Lösung. Im Gegensatz dazu ist die höhere Polzahl eines Schrittmotors bei niedrigeren Drehzahlen von Vorteil, da er hier ein höheres Drehmoment als ein gleich großer Servomotor aufweist.
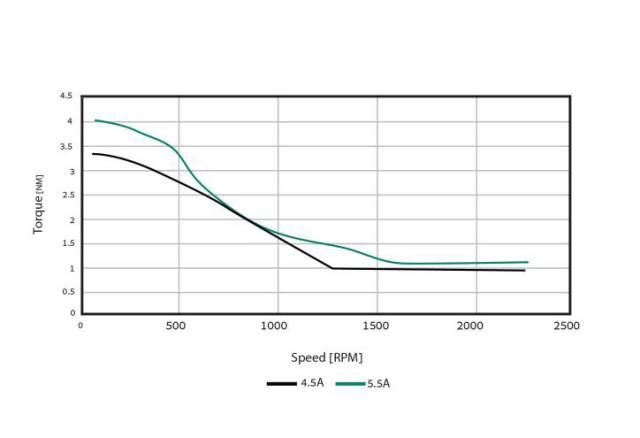
Mit zunehmender Drehzahl sinkt das Drehmoment des Schrittmotors.
4. Positionierung
In Anwendungen, in denen die exakte Maschinenposition jederzeit bekannt sein muss, bestehen wichtige Unterschiede zwischen Schrittmotoren und Servomotoren. Bei Schrittmotoren in offenen Bewegungsabläufen geht das Steuerungssystem davon aus, dass sich der Motor stets im korrekten Bewegungszustand befindet. Tritt jedoch ein Problem auf, beispielsweise ein blockierter Motor aufgrund eines festsitzenden Bauteils, kann die Steuerung die tatsächliche Maschinenposition nicht mehr ermitteln, was zu einem Positionsverlust führen kann. Das geschlossene System des Servomotors bietet hier einen Vorteil: Wird er durch ein Objekt blockiert, erkennt es dies sofort. Die Maschine stoppt den Betrieb und behält ihre Position.
5. Wärme- und Energieverbrauch
Schrittmotoren im offenen Regelkreis verbrauchen einen festen Strom und erzeugen viel Wärme. Die Regelung im geschlossenen Regelkreis liefert nur den für den Drehzahlregelkreis benötigten Strom und vermeidet so die Überhitzung des Motors.
Vergleichsübersicht
Servo-Steuerungssysteme eignen sich am besten für Hochgeschwindigkeitsanwendungen mit dynamischen Laständerungen, wie beispielsweise Roboterarme. Schrittmotor-Steuerungssysteme hingegen sind besser geeignet für Anwendungen, die eine niedrige bis mittlere Beschleunigung und ein hohes Haltemoment erfordern, wie etwa 3D-Drucker, Förderbänder, Unterachsen usw. Da Schrittmotoren kostengünstiger sind, können sie die Kosten von Automatisierungssystemen senken. Bewegungssteuerungssysteme, die die Eigenschaften von Servomotoren nutzen möchten, müssen erst beweisen, dass sich die höheren Kosten dieser Motoren lohnen.
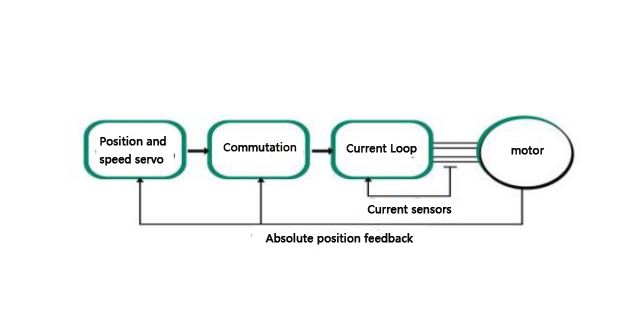
Schrittmotoren mit Regelung
Der Schrittmotor mit integrierter elektronischer Steuerung entspricht einem zweiphasigen bürstenlosen Gleichstrommotor und ermöglicht Positions-, Drehzahl- und DQ-Regelung sowie weitere Algorithmen. Ein Absolutwertgeber mit einer Umdrehung dient der geschlossenen Kommutierung und gewährleistet so ein optimales Drehmoment bei jeder Drehzahl.
Geringer Energieverbrauch und Kühlung
VIC-Schrittmotoren sind äußerst energieeffizient. Im Gegensatz zu Open-Loop-Schrittmotoren, die stets mit voller Stromstärke arbeiten und dadurch Wärme- und Geräuschprobleme verursachen, passt sich der Strom bei VIC-Schrittmotoren den tatsächlichen Bewegungsbedingungen an, beispielsweise beim Beschleunigen und Bremsen. Ähnlich wie bei Servomotoren ist der Stromverbrauch dieser Schrittmotoren proportional zum benötigten Drehmoment. Da Motor und integrierte Steuerelektronik weniger Wärme abgeben, erreichen VIC-Schrittmotoren höhere Spitzendrehmomente, vergleichbar mit Servomotoren.
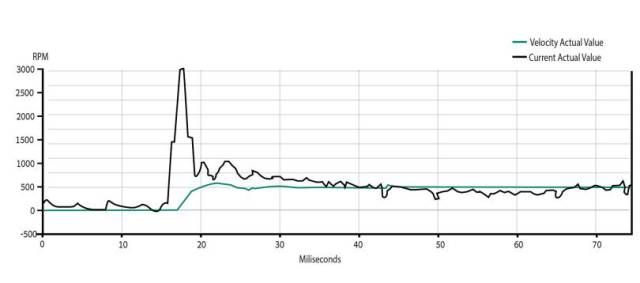
Selbst bei hohen Drehzahlen benötigen VIC-Schrittmotoren weniger Strom.
Dank Fortschritten in der Regelungstechnik können Schrittmotoren nun auch in Hochleistungs- und Hochgeschwindigkeitsanwendungen eingesetzt werden, die zuvor ausschließlich Servomotoren vorbehalten waren.
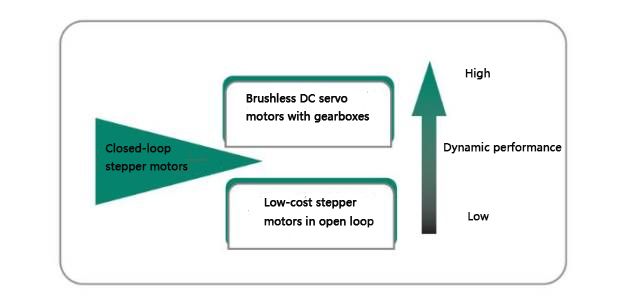
Schrittmotoren mit Regelungstechnik
Was wäre, wenn die Vorteile der Servoregelungstechnik mit geschlossenem Regelkreis auf Schrittmotoren angewendet werden könnten?
Könnten wir eine vergleichbare Leistung wie Servomotoren erzielen und gleichzeitig die Kostenvorteile von Schrittmotoren nutzen?
Durch die Kombination mit Regelungstechnik würde der Schrittmotor zu einem Komplettprodukt, das die Vorteile von Servo- und Schrittmotoren zu geringen Kosten vereint. Da Schrittmotoren mit Regelungstechnik deutliche Verbesserungen in Leistung und Energieeffizienz bieten, können sie in immer mehr anspruchsvollen Anwendungen teurere Servomotoren ersetzen.
Nachfolgend ein Beispiel eines VIC-integrierten Schrittmotors mit eingebetteter Regelung, um die Leistungsfähigkeit sowie die Vor- und Nachteile von Schrittmotoren mit Regelungstechnik zu erläutern.
Exakt abgestimmte Leistungsanforderungen
Um ausreichend Drehmoment zur Kompensation von Störungen und zur Vermeidung von Schrittverlusten zu gewährleisten, müssen Open-Loop-Schrittmotoren üblicherweise ein Drehmoment liefern, das mindestens 40 % über dem für die Anwendung erforderlichen Wert liegt. Closed-Loop-Schrittmotoren von toda haben dieses Problem nicht. Selbst wenn diese Schrittmotoren aufgrund einer Überlastung blockieren, halten sie die Last ohne Drehmomentverlust. Sie arbeiten auch nach Beseitigung der Überlastung weiter. Maximales Drehmoment ist bei jeder Drehzahl garantiert, und der Positionssensor stellt sicher, dass kein Schrittverlust auftritt. Closed-Loop-Schrittmotoren können daher exakt auf die Drehmomentanforderungen der jeweiligen Anwendung abgestimmt werden, ohne dass eine zusätzliche 40%ige Reserve erforderlich ist.
Bei Schrittmotoren mit offener Regelung ist es aufgrund des Risikos von Schrittverlusten schwierig, hohe Drehmomentanforderungen zu erfüllen. Im Vergleich zu herkömmlichen Schrittmotoren ermöglichen VIC-Schrittmotoren mit geschlossener Regelung eine sehr schnelle Beschleunigung, geringe Betriebsgeräusche und geringe Resonanz. Sie arbeiten in deutlich höheren Bandbreiten und erzielen eine hervorragende Leistung.
Kein Schrank
Toda integriert die Antriebssteuerung in den Motor, wodurch der Verkabelungsaufwand reduziert und die Implementierung vereinfacht wird. Mit Toda lassen sich Maschinen ohne Schaltschrank bauen.
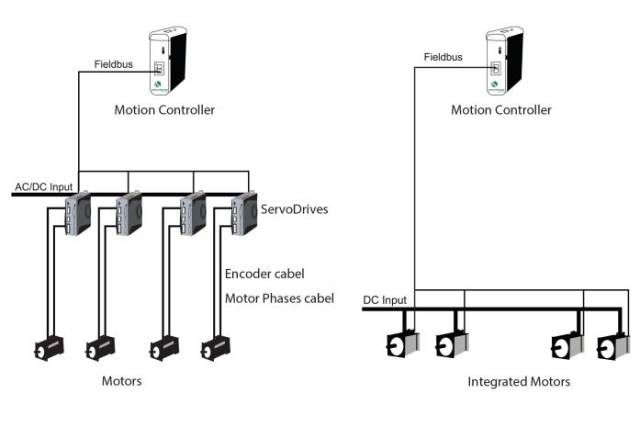
Die Integration von Elektronik in Schrittmotoren reduziert die Komplexität
Dank der Closed-Loop-Technologie bieten Closed-Loop-Schrittmotoren Anwendern hervorragende Genauigkeit und Effizienz, die Leistung eines Servomotors mit den geringen Kosten eines Schrittmotors. Kostengünstigere Schrittmotoren erobern zunehmend Anwendungsbereiche, die bisher von teuren Servomotoren dominiert wurden.
Veröffentlichungsdatum: 10. April 2023