Geschlossener KreislaufSchrittmotorenhaben das Preis-Leistungs-Verhältnis in vielen Motion-Control-Anwendungen verändert. Der Erfolg der VIC-Closed-Loop-Progressivmotoren hat zudem die Möglichkeit eröffnet, teure Servomotoren durch kostengünstige zu ersetzen.Schrittmotoren.In immer mehr anspruchsvollen industriellen Automatisierungsanwendungen verändern technologische Fortschritte das Preis-Leistungs-Verhältnis zwischen Schrittmotoren und Servomotoren.
Schrittmotoren versus Servomotoren
Nach allgemeiner Auffassung sind Servosteuerungssysteme in Anwendungen, bei denen Drehzahlen über 800 U/min und eine hohe Dynamik erforderlich sind, leistungsfähiger. Schrittmotoren eignen sich besser für Anwendungen mit niedrigeren Drehzahlen, geringer bis mittlerer Beschleunigung und hohem Haltemoment.
Worauf basiert also diese allgemeine Meinung über Schrittmotoren und Servomotoren? Lassen Sie uns dies im Folgenden genauer analysieren.
1. Einfachheit und Kosten
Schrittmotoren sind nicht nur günstiger als Servomotoren, sondern auch einfacher in Betrieb zu nehmen und zu warten. Schrittmotoren sind im Stillstand stabil und halten ihre Position (auch bei dynamischer Belastung). Wird für bestimmte Anwendungen jedoch eine höhere Leistung benötigt, müssen teurere und aufwändigere Servomotoren eingesetzt werden.
2. Struktur
SchrittmotorenDrehen Sie schrittweise, indem Sie Magnetspulen verwenden, um einen Magneten schrittweise von einer Position zur nächsten zu ziehen. Um den Motor 100 Positionen in eine beliebige Richtung zu bewegen, erfordert die Schaltung 100 Schrittvorgänge am Motor. Schrittmotoren verwenden Impulse für inkrementelle Bewegungen und ermöglichen so eine präzise Positionierung ohne den Einsatz von Rückkopplungssensoren.
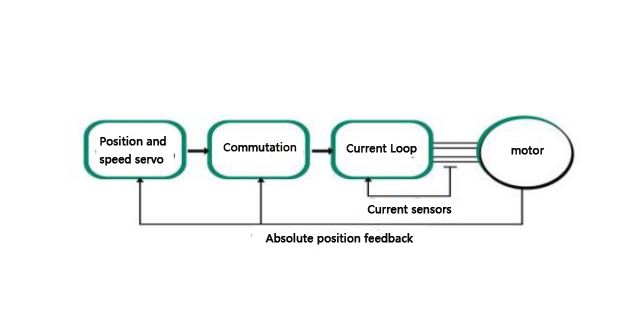
Die Bewegungsmethode des Servomotors ist anders. Er verbindet einen Positionssensor – einen Encoder – mit dem magnetischen Rotor und erfasst kontinuierlich die genaue Position des Motors. Der Servo überwacht die Differenz zwischen der tatsächlichen und der Sollposition des Motors und passt den Strom entsprechend an. Dieses geschlossene Regelsystem hält den Motor im korrekten Bewegungszustand.

3. Drehzahl und Drehmoment
Der Leistungsunterschied zwischen Schritt- und Servomotoren ergibt sich aus den unterschiedlichen Motorkonstruktionen.Schrittmotorenhaben eine deutlich höhere Polzahl als Servomotoren. Daher erfordert eine volle Umdrehung eines Schrittmotors deutlich mehr Wicklungsstromwechsel, was bei steigender Drehzahl zu einem rapiden Drehmomentabfall führt. Zudem kann der Schrittmotor bei Erreichen des maximalen Drehmoments seine Drehzahlsynchronisationsfunktion verlieren. Aus diesen Gründen sind Servomotoren in den meisten Hochgeschwindigkeitsanwendungen die bevorzugte Lösung. Im Gegensatz dazu ist die höhere Polzahl eines Schrittmotors bei niedrigeren Drehzahlen von Vorteil, da der Schrittmotor dann einen Drehmomentvorteil gegenüber einem Servomotor gleicher Größe bietet.
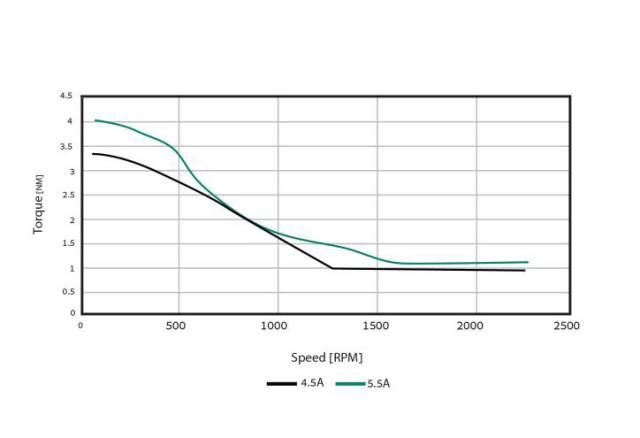
Mit zunehmender Geschwindigkeit nimmt das Drehmoment des Schrittmotors ab
4. Positionierung
Es gibt wichtige Unterschiede zwischen Schrittmotoren und Servomotoren bei Anwendungen, bei denen die genaue Position der Maschine jederzeit bekannt sein muss. Bei offenen Bewegungsanwendungen mit Schrittmotoren geht die Steuerung davon aus, dass sich der Motor stets im korrekten Bewegungszustand befindet. Tritt jedoch ein Problem auf, beispielsweise ein blockierter Motor aufgrund eines festsitzenden Bauteils, kann die Steuerung die tatsächliche Position der Maschine nicht mehr ermitteln, was zu einem Positionsverlust führen kann. Das geschlossene Regelsystem des Servomotors bietet einen Vorteil: Wird er durch ein Objekt blockiert, erkennt es dies sofort. Die Maschine stoppt den Betrieb und verliert nie ihre Position.
5. Wärme- und Energieverbrauch
Schrittmotoren mit offenem Regelkreis verwenden einen festen Strom und geben viel Wärme ab. Bei der Regelung mit geschlossenem Regelkreis wird nur der für die Drehzahlregelung benötigte Strom bereitgestellt, wodurch das Problem der Motorerwärmung vermieden wird.
Vergleichszusammenfassung
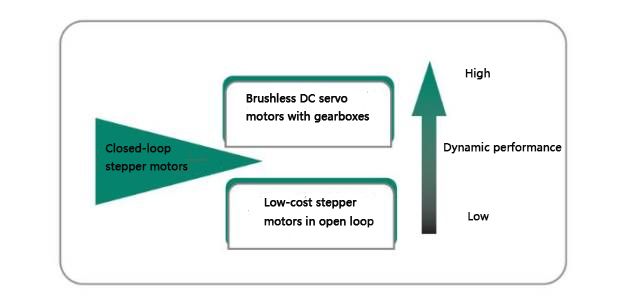
Servosteuerungssysteme eignen sich am besten für Hochgeschwindigkeitsanwendungen mit dynamischen Lastwechseln, wie z. B. Roboterarme. Schrittmotorsteuerungen hingegen eignen sich besser für Anwendungen, die niedrige bis mittlere Beschleunigung und hohes Haltemoment erfordern, wie z. B. 3D-Drucker, Förderbänder, Subachsen usw. Da Schrittmotoren günstiger sind, können sie die Kosten von Automatisierungssystemen senken. Motion-Control-Systeme, die die Eigenschaften von Servomotoren nutzen, müssen beweisen, dass diese teureren Motoren Gold wert sind.
Schrittmotoren mit Closed-Loop-Regelung
Der Schrittmotor mit integrierter elektronischer Steuerung entspricht einem zweiphasigen bürstenlosen Gleichstrommotor und kann Positions-, Drehzahl- und DQ-Regelungen sowie weitere Algorithmen ausführen. Ein Singleturn-Absolutwertgeber dient der Closed-Loop-Kommutierung und sorgt so für optimales Drehmoment bei jeder Drehzahl.
Geringer Energieverbrauch und kühl bleiben
VIC-Schrittmotoren sind äußerst energieeffizient. Im Gegensatz zu Open-Loop-Schrittmotoren, die stets mit vollem Strom laufen und dadurch Hitze und Lärm verursachen, passt sich der Strom den tatsächlichen Bewegungsbedingungen an, beispielsweise beim Beschleunigen und Abbremsen. Ähnlich wie bei Servomotoren ist die Stromaufnahme dieser Schrittmotoren proportional zum benötigten Drehmoment. Da Motor und integrierte Steuerplatine kühler laufen, erreichen VIC-Schrittmotoren höhere Spitzendrehmomente, vergleichbar mit Servomotoren.
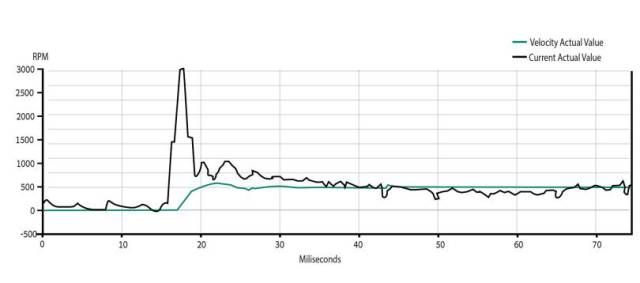
Auch bei hohen Geschwindigkeiten benötigen VIC-Schrittmotoren weniger Strom
Dank der Fortschritte in der Closed-Loop-Technologie können Schrittmotoren nun auch in Hochleistungs- und Hochgeschwindigkeitsanwendungen vordringen, die bisher ausschließlich Servomotoren vorbehalten waren.
Schrittmotoren mit Closed-Loop-Technologie
Was wäre, wenn die Vorteile der Closed-Loop-Servotechnologie auf Schrittmotoren angewendet werden könnten?
Könnten wir eine mit Servomotoren vergleichbare Leistung erzielen und gleichzeitig die Kostenvorteile von Schrittmotoren nutzen?
Durch die Kombination von Regelungstechnik und Schrittmotoren wird der Schrittmotor zu einem umfassenden Produkt, das die Vorteile von Servo- und Schrittmotoren zu niedrigen Kosten vereint. Da Schrittmotoren mit Regelungstechnik deutliche Leistungssteigerungen und eine höhere Energieeffizienz bieten, können sie in immer mehr anspruchsvollen Anwendungen teurere Servomotoren ersetzen.
Im Folgenden wird anhand eines Beispiels eines VIC-integrierten Schrittmotors mit eingebetteter Closed-Loop-Steuerung die Leistung sowie die Vor- und Nachteile von Schrittmotoren mit Closed-Loop-Technologie erläutert.
Exakt abgestimmte Leistungsanforderungen
Um ein ausreichendes Drehmoment zur Überwindung von Störungen und zur Vermeidung von Schrittverlusten sicherzustellen, müssen Schrittmotoren mit offenem Regelkreis in der Regel ein Drehmoment von mindestens 40 % über dem von der Anwendung geforderten Wert aufweisen. Bei Schrittmotoren mit geschlossenem Regelkreis tritt dieses Problem nicht auf. Sollten diese Schrittmotoren aufgrund einer Überlastung blockieren, halten sie die Last ohne Drehmomentverlust. Sie laufen auch nach Beseitigung der Überlast weiter. Das maximale Drehmoment kann bei jeder Drehzahl garantiert werden, und der Positionssensor stellt sicher, dass kein Schrittverlust auftritt. Schrittmotoren mit geschlossenem Regelkreis können daher so spezifiziert werden, dass sie den Drehmomentanforderungen der jeweiligen Anwendung exakt entsprechen, ohne dass eine zusätzliche Marge von 40 % erforderlich ist.
Bei Schrittmotoren mit offenem Regelkreis ist es aufgrund der Gefahr von Schrittverlusten schwierig, hohe Momentandrehmomentanforderungen zu erfüllen. Im Vergleich zu herkömmlichen Schrittmotoren erreichen VIC-Schrittmotoren mit geschlossenem Regelkreis eine sehr hohe Beschleunigung, geringe Betriebsgeräusche und geringe Resonanz. Sie können mit deutlich höheren Bandbreiten arbeiten und erzielen eine hervorragende Leistung.
Kein Schrank
Toda integriert die Antriebssteuerplatine in den Motor, wodurch der Verkabelungsaufwand reduziert und die Implementierungslösung vereinfacht wird. Mit Toda können Sie Maschinen ohne Schaltschränke bauen.
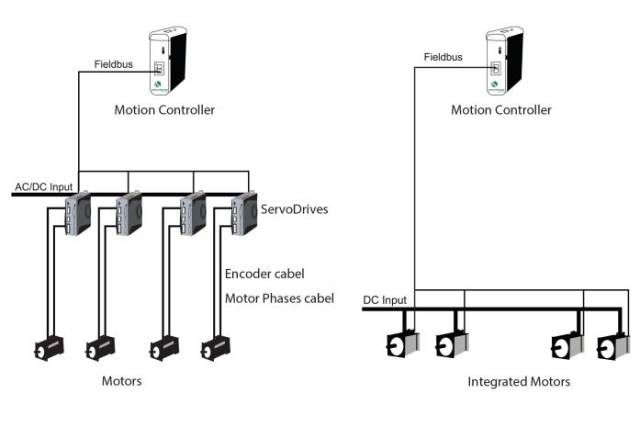
Die Integration von Elektronik in Schrittmotoren reduziert die Komplexität
Dank der Closed-Loop-Technologie bieten Closed-Loop-Schrittmotoren dem Anwender höchste Genauigkeit und Effizienz bei gleichzeitiger Leistung eines Servomotors und den niedrigen Kosten eines Schrittmotors. Kostengünstigere Schrittmotoren erobern zunehmend Anwendungen, die sonst von teuren Servomotoren dominiert würden.
Veröffentlichungszeit: 10. April 2023