Nach demSchrittmotorEs kommt zu einer Hemmung der Rotation durch den Arbeitsstrom, ähnlich wie bei einem Aufzug, der in der Luft schwebt. Dieser Strom führt zur Erwärmung des Motors; dies ist ein normales Phänomen.
Grund eins.
Einer der bedeutendsten Vorteile vonSchrittmotorenDie präzise Regelung, die in einem System mit offenem Regelkreis erreicht werden kann, wird als „Open-Loop-Regelung“ bezeichnet. Offene Regelung bedeutet, dass keine Rückkopplungsinformationen über die (Rotor-)Position erforderlich sind.
Diese Steuerung vermeidet den Einsatz teurer Sensoren und Rückkopplungsgeräte wie optischer Encoder, da lediglich die Eingangsimpulse zur Positionsbestimmung des Rotors erfasst werden müssen. Kürzlich haben einige Kunden unsere Motoreningenieure von Shangshe darauf hingewiesen, dass Schrittmotoren auch zu Überhitzungsproblemen neigen. Wie lässt sich dieses Problem lösen?
1. ReduzierenSchrittmotorUm Wärmeverluste zu minimieren, müssen Kupfer- und Eisenverluste reduziert werden. Dies geschieht durch die Reduzierung von Kupferverlusten sowie durch die Verringerung von Stromstärke und elektrischem Widerstand. Daher ist es wichtig, Motoren mit möglichst geringem Widerstand und Nennstrom zu verwenden. Zweiphasen-Schrittmotoren können in Reihenschaltung, nicht aber parallel, eingesetzt werden. Dies steht jedoch oft im Widerspruch zu den Anforderungen an Drehmoment und hohe Drehzahl.
2. Da der Motor ausgewählt wurde, sollten die automatische Halbstromregelungsfunktion und die Offline-Funktion des Antriebs voll genutzt werden. Erstere reduziert automatisch den Strom, wenn der Motor stillsteht, letztere schaltet den Strom einfach ab.
3. Darüber hinaus ist der Stromverlauf bei Unterteilungs-Schrittmotoren aufgrund der annähernd sinusförmigen Stromkurve weniger oszillierend, wodurch die Motorerwärmung geringer ausfällt. Es gibt verschiedene Möglichkeiten, die Eisenverluste zu reduzieren; die Spannungsebene spielt dabei eine Rolle. Hochspannungsansteuerung führt zwar zu höheren Drehzahlen, aber auch zu einer stärkeren Wärmeentwicklung.
4. Bei der Auswahl der geeigneten Antriebsmotorspannung sind die Bandbreite, Laufruhe, Wärmeentwicklung, Geräuschentwicklung und andere Indikatoren zu berücksichtigen.
Grund zwei.
Die Wärmeentwicklung von Schrittmotoren beeinträchtigt zwar im Allgemeinen nicht deren Lebensdauer und ist daher für die meisten Anwender irrelevant. Sie kann jedoch ernsthafte negative Auswirkungen haben. Beispielsweise beeinflussen unterschiedliche thermische Ausdehnungskoeffizienten der einzelnen Bauteile sowie geringfügige Änderungen des internen Luftspalts das dynamische Verhalten des Schrittmotors. Bei hohen Drehzahlen kann es leicht zu Schrittverlusten kommen. In manchen Anwendungsbereichen, wie etwa in Medizingeräten und hochpräzisen Prüfgeräten, ist eine übermäßige Wärmeentwicklung von Schrittmotoren unerwünscht. Daher ist eine Kontrolle der Wärmeentwicklung des Schrittmotors unerlässlich. Die genannten Faktoren tragen zur Motorwärme bei.
1. Der vom Treiber eingestellte Strom ist größer als der Nennstrom des Motors.
2. Die Drehzahl des Motors ist zu hoch.
3. Der Motor selbst besitzt ein hohes Trägheitsmoment und ein hohes Positioniermoment, wodurch er sich auch bei mittlerer Drehzahl erwärmt. Dies beeinträchtigt jedoch nicht seine Lebensdauer. Der Entmagnetisierungspunkt des Motors liegt bei 130–200 °C. Eine Temperatur von 70–90 °C ist daher normal. Solange die Temperatur unter 130 °C bleibt, besteht in der Regel kein Problem. Sollte der Motor dennoch überhitzen, kann der Ansteuerstrom auf etwa 70 % des Nennstroms oder die Motordrehzahl reduziert werden.
Grund drei.
Schrittmotoren, als digitale Aktuatoren, finden breite Anwendung in Bewegungssteuerungssystemen. Viele Anwender berichten von einer starken Wärmeentwicklung im Betrieb und fragen sich, ob dies normal ist. Tatsächlich ist Wärmeentwicklung ein häufiges Phänomen bei Schrittmotoren. Doch ab welchem Grad an Wärme gilt dies als normal, und wie lässt sich die Wärmeentwicklung minimieren?
Im Folgenden nehmen wir eine einfache Klassifizierung vor, die hoffentlich in der tatsächlichen Arbeit praktischer Anwendungen Anwendung finden wird:
1. Motorheizungsprinzip
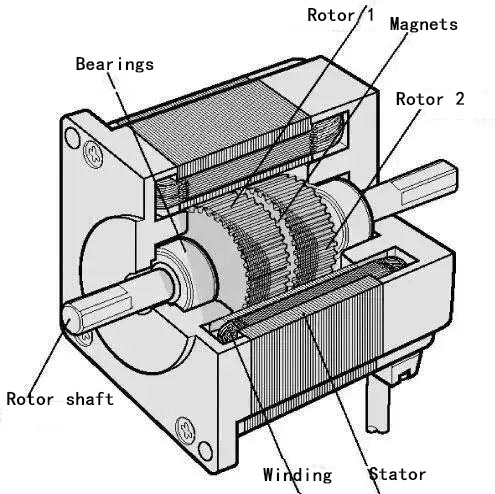
Wir sehen üblicherweise alle Arten von Motoren, bestehend aus Kern und Wicklung. Die Wicklung besitzt einen Widerstand und verursacht unter Spannung Verluste. Die Größe dieser Verluste ist proportional zum Quadrat des Widerstands und des Stroms. Diese Verluste werden oft als Kupferverluste bezeichnet. Bei Stromstärken, die nicht dem Standard-Gleichstrom oder einer Sinuswelle entsprechen, treten zusätzlich Oberwellenverluste auf. Der Kern weist einen Hystereseeffekt durch Wirbelströme auf. Im Wechselfeld entstehen ebenfalls Verluste. Diese Eisenverluste hängen von der Materialstärke, der Stromstärke, der Frequenz und der Spannung ab. Kupfer- und Eisenverluste äußern sich in Form von Wärme und beeinträchtigen somit den Wirkungsgrad des Motors. Schrittmotoren sind im Allgemeinen auf Positioniergenauigkeit und Drehmoment ausgelegt. Ihr Wirkungsgrad ist relativ gering, der Strom hingegen relativ hoch und weist einen hohen Anteil an Oberwellen auf. Die Frequenz der Stromschwankungen variiert zudem mit der Drehzahl. Daher erzeugen Schrittmotoren im Allgemeinen Wärme, und zwar in einem deutlich stärkeren Ausmaß als bei herkömmlichen Wechselstrommotoren.
2 Schrittmotoren-Wärmebereich
Das zulässige Maß an Wärmeentwicklung eines Motors hängt maßgeblich von dessen interner Isolierung ab. Diese wird erst bei hohen Temperaturen (über 130 °C) zerstört. Solange die Innentemperatur 130 °C nicht übersteigt, wird der Motor nicht beschädigt, und die Oberflächentemperatur liegt unter 90 °C. Daher sind Oberflächentemperaturen von Schrittmotoren zwischen 70 und 80 °C normal. Mit einem einfachen Punktthermometer lässt sich die Temperatur grob bestimmen: Hält man die Oberfläche 1–2 Sekunden lang mit der Hand warm, liegt die Temperatur unter 60 °C; bei kurzer Berührung etwa 70–80 °C; verdampfen einige Wassertropfen schnell, liegt die Temperatur über 90 °C.
3-Schrittmotorheizung mit Geschwindigkeitsänderung
Bei Verwendung der Konstantstrom-Ansteuerungstechnik bleibt der Strom eines Schrittmotors im Stillstand und bei niedriger Drehzahl konstant, um ein konstantes Drehmoment zu gewährleisten. Steigt die Drehzahl ab einem bestimmten Wert, erhöht sich das interne Gegenpotenzial des Motors, der Strom sinkt allmählich und damit auch das Drehmoment. Die durch Kupferverluste verursachte Wärmeentwicklung ist daher drehzahlabhängig. Im Stillstand und bei niedriger Drehzahl entsteht in der Regel viel Wärme, bei hoher Drehzahl hingegen wenig. Die Eisenverluste (wenn auch in geringerem Maße) ändern sich jedoch nicht gleichmäßig, und die Gesamtwärme des Motors ergibt sich aus der Summe beider Verluste. Daher stellt die obige Beschreibung nur eine allgemeine Situation dar.
4. Durch den Aufprall hervorgerufene Hitze
Obwohl die Motorwärme im Allgemeinen die Lebensdauer des Motors nicht beeinträchtigt und die meisten Kunden ihr keine Beachtung schenken, kann sie dennoch negative Auswirkungen haben. Beispielsweise führen unterschiedliche Wärmeausdehnungskoeffizienten der internen Motorteile zu Veränderungen der strukturellen Spannungen und geringfügigen Änderungen des internen Luftspalts. Dies beeinträchtigt das dynamische Verhalten des Motors, wodurch er bei hohen Drehzahlen leicht an Geschwindigkeit verlieren kann. In manchen Anwendungsbereichen, wie etwa bei medizinischen Geräten und hochpräzisen Prüfgeräten, ist übermäßige Motorwärme unerwünscht. Daher sollte die Wärmeentwicklung des Motors gegebenenfalls kontrolliert werden.
5. Wie man die Motorwärme reduziert
Die Reduzierung der Wärmeentwicklung bedeutet die Verringerung von Kupfer- und Eisenverlusten. Kupferverluste lassen sich in zwei Richtungen reduzieren: durch Verringerung von Widerstand und Stromstärke. Dies erfordert die Auswahl eines möglichst kleinen Widerstands und Nennstroms. Bei Zweiphasenmotoren können mehrere Motoren in Reihe geschaltet werden, ohne Parallelschaltung. Dies steht jedoch oft im Widerspruch zu den Anforderungen an Drehmoment und hohe Drehzahl. Für den ausgewählten Motor sollten die automatische Halbstromregelung und die Offline-Funktion des Antriebs optimal genutzt werden. Erstere reduziert den Strom automatisch im Stillstand, letztere schaltet den Strom ab. Darüber hinaus führt die Verwendung eines Frequenzumrichters mit sinusförmiger Stromkurve und weniger Oberschwingungen zu einer geringeren Motorerwärmung. Eisenverluste lassen sich auf verschiedene Weise reduzieren, wobei die Spannungsebene eine wichtige Rolle spielt. Obwohl ein mit hoher Spannung betriebener Motor höhere Drehzahlen ermöglicht, führt dies auch zu einer höheren Wärmeentwicklung. Daher sollte die geeignete Antriebsspannung unter Berücksichtigung von Drehzahl, Laufruhe, Wärmeentwicklung, Geräuschentwicklung und anderen relevanten Parametern gewählt werden.
Bei allen Arten von Schrittmotoren besteht das Innere aus einem Eisenkern und einer Wicklung. Die Wicklung besitzt einen Widerstand; unter Spannung entstehen Verluste, deren Größe proportional zum Quadrat des Widerstands und des Stroms ist. Diese Verluste werden oft als Kupferverluste bezeichnet. Bei Stromstärken, die nicht dem Standard-Gleichstrom oder einer Sinuswelle entsprechen, treten zusätzlich Oberwellenverluste auf. Der Kern weist einen Hystereseeffekt auf, der in einem Wechselfeld ebenfalls Verluste verursacht. Diese Eisenverluste hängen von der Materialgröße, der Stromstärke, der Frequenz und der Spannung ab. Kupfer- und Eisenverluste äußern sich in Form von Wärme und beeinträchtigen somit den Wirkungsgrad des Motors. Schrittmotoren sind im Allgemeinen auf Positioniergenauigkeit und Drehmoment ausgelegt, was zu einem relativ geringen Wirkungsgrad, einem relativ hohen Strom und einem hohen Anteil an Oberwellen führt. Die Frequenz der Stromschwankungen variiert zudem mit der Drehzahl, wodurch Schrittmotoren im Allgemeinen Wärme erzeugen – ein Problem, das im Vergleich zu herkömmlichen Wechselstrommotoren deutlich ausgeprägter ist.
Veröffentlichungsdatum: 16. November 2022