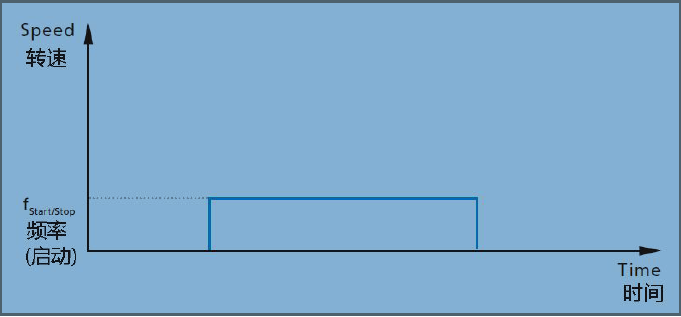
① Die Analyse hängt vom Bewegungsprofil ab. Start-Stopp-Betrieb: In diesem Betriebsmodus ist der Motor mit der Last verbunden und läuft mit konstanter Drehzahl. Der Motor muss die Last im ersten Schritt auf die vorgegebene Frequenz beschleunigen (Trägheit und Reibung überwinden).
Fehlermodus:Schrittmotorstartet nicht
| Gründe | Lösungen |
| Die Last ist zu hoch | Falscher Motor, wählen Sie einen größeren Motor |
| Frequenz zu hoch | Häufigkeit reduzieren |
| Wenn der Motor von links nach rechts schwingt, kann eine Phase unterbrochen oder nicht angeschlossen sein. | Motor ersetzen oder reparieren |
| Der Phasenstrom ist nicht angemessen. | Erhöhen Sie den Phasenstrom, zumindest während der ersten Phase. wenige Schritte. |
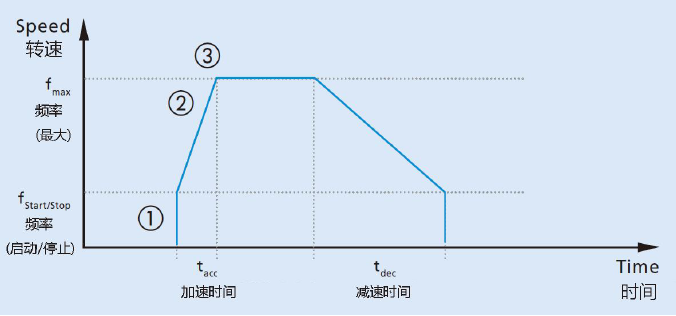
②Beschleunigungsmodus: In diesem FallSchrittmotordarf mit einer im Treiber voreingestellten Beschleunigungsrate auf die maximale Frequenz beschleunigen.
Fehlermodus: Schrittmotor startet nicht.
Aus Gründen undLösungensiehe Abschnitt ① „Start-Stopp-Betrieb“.
Fehlermodus: Der Schrittmotor beendet die Beschleunigungsrampe nicht.
| Gründe | Lösungen |
| Motor in Resonanzfrequenz gefangen | ● Erhöhen Sie die Beschleunigung, um die Resonanz zu erreichen.Frequenz schnell● Wählen Sie eine Start-Stopp-Frequenz oberhalb des Resonanzpunktes●Verwenden Sie Halbschritt- oder Mikroschrittbetrieb●Fügen Sie einen mechanischen Dämpfer hinzu, der die Form einesTrägheitsscheibe an der hinteren Welle |
| Falsche Versorgungsspannung oder falsche Stromstärke (zu niedrig) | ● Spannung oder Stromstärke erhöhen (es ist zulässig, einen höheren Wert einzustellen).(für einen kurzen Zeitraum)● Testen Sie einen Motor mit niedrigerer Impedanz●Verwenden Sie einen Konstantstromantrieb (falls ein Konstantspannungsantrieb verwendet wird) |
| Höchstgeschwindigkeit zu hoch | ●Reduzierung der Höchstgeschwindigkeit●Verringern Sie die Beschleunigungsrampe. |
| Schlechte Qualität der Beschleunigungsrampe vomElektronik (tritt bei digitalen Rampen auf) | ● Versuchen Sie es mit einem anderen Treiber |
Fehlermodus: Der Schrittmotor beendet die Beschleunigung, bleibt aber stehen, sobald eine konstante Drehzahl erreicht ist.
| Gründe | Lösungen |
| Der Schrittmotor arbeitet an seiner Leistungsgrenze. Leistungsfähigkeit und Abwürgen aufgrund zu hoher Beschleunigung. Die Gleichgewichtslage wurde überschießen. verursacht Rotorschwingungen und Instabilität. | ● Wählen Sie eine geringere Beschleunigungsrate oder verwenden Sie zwei verschiedeneDie Beschleunigungswerte sind zu Beginn hoch und sinken mit zunehmender Höchstgeschwindigkeit.●Erhöhung des Drehmoments● Bringen Sie einen mechanischen Dämpfer an der hinteren Antriebswelle an. Beachten Sie, dassDadurch erhöht sich die Trägheit des Rotors, was das Problem möglicherweise nicht löst.wenn die Höchstgeschwindigkeit an der Leistungsgrenze des Motors liegt. ●Den Motor mittels Mikroschrittsteuerung ansteuern |
③ Zunahme der Nutzlast im Laufe der Zeit
In manchen Fällen läuft der Motor zunächst lange Zeit normal, verliert dann aber nach einiger Zeit Schritte. In diesem Fall hat sich wahrscheinlich die Last, der der Motor ausgesetzt ist, verändert. Dies kann durch Verschleiß der Motorlager oder durch ein äußeres Ereignis verursacht werden.
Lösungen:
● Prüfen Sie, ob ein externes Ereignis vorliegt: Hat sich der vom Motor angetriebene Mechanismus verändert?
● Lagerverschleiß prüfen: Verwenden Sie Kugellager anstelle von Sintergleitlagern, um die Lebensdauer des Motors zu verlängern.
● Prüfen Sie, ob sich die Umgebungstemperatur geändert hat. Ihr Einfluss auf die Viskosität des Lagerschmierstoffs ist bei Mikromotoren nicht unerheblich. Verwenden Sie für den Betriebsbereich geeignete Schmierstoffe. (Beispiel: Schmierstoff kann bei extremen Temperaturen oder nach längerem Gebrauch zähflüssig werden, was die Nutzlast erhöht.)
Veröffentlichungsdatum: 16. November 2022