Verschiedene Motoren werden in vielen Bereichen benötigt, darunter auch in den bekannten BereichenSchrittmotorenund Servomotoren. Viele Anwender kennen jedoch die wesentlichen Unterschiede zwischen diesen beiden Motortypen nicht und wissen daher nicht, welchen sie wählen sollen. Was sind also die Hauptunterschiede zwischenSchrittmotorenund Servomotoren?
Servomotor
1. Funktionsprinzip
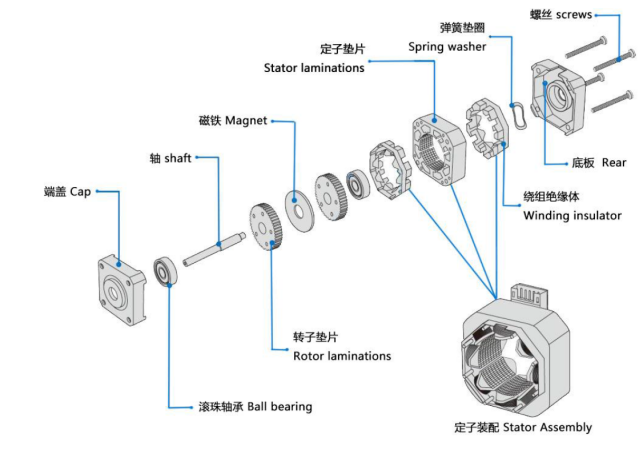
Diese beiden Motoren unterscheiden sich prinzipiell sehr. Der Schrittmotor wandelt ein elektrisches Impulssignal in eine Winkel- oder Linearverschiebung des offenen Regelkreises um. (Siehe Funktionsprinzip des Schrittmotors.)
Und Servos basieren hauptsächlich auf der Positionssteuerung mittels Impulsen. Der Servomotor selbst sendet Impulse aus, sodass er bei jeder Umdrehung um einen bestimmten Winkel die entsprechende Anzahl von Impulsen aussendet. Durch das Empfangen dieser Impulse durch den Servomotor entsteht ein Echo bzw. ein geschlossener Regelkreis, sodass das System genau weiß, wie viele Impulse gesendet und wie viele zurückempfangen wurden. Dadurch kann die Drehung des Motors präzise gesteuert und eine genaue Positionierung erreicht werden.
2. Regelgenauigkeit
Die Präzision von Schrittmotoren wird im Allgemeinen durch die genaue Steuerung des Schrittwinkels erreicht, wofür viele verschiedene Unterteilungszahnräder zur Erzielung einer genauen Steuerung eingesetzt werden.
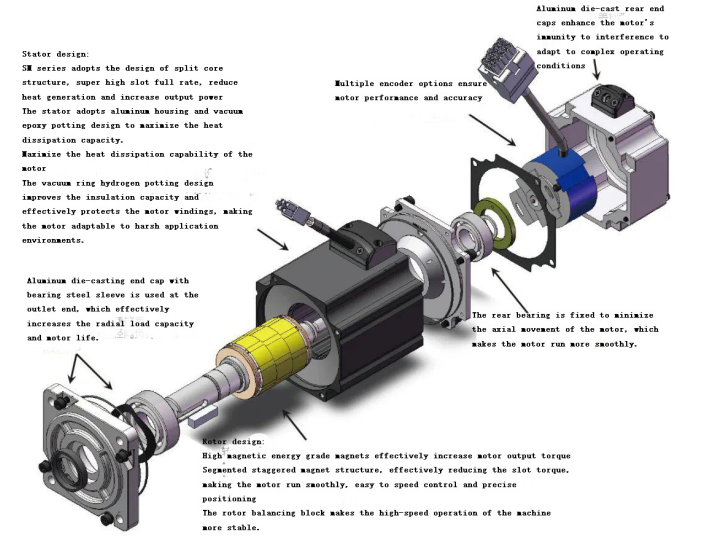
Die Regelgenauigkeit des Servomotors wird durch den Drehgeber am hinteren Ende der Motorwelle gewährleistet und ist im Allgemeinen höher als die des Schrittmotors.
3. Geschwindigkeit und Überlastfähigkeit
Schrittmotoren neigen im Niedrigdrehzahlbetrieb zu niederfrequenten Vibrationen. Daher ist bei diesem Betrieb üblicherweise eine Dämpfungstechnik erforderlich, um diese Vibrationen zu minimieren. Dies kann beispielsweise durch das Anbringen von Dämpfern am Motor oder durch die Verwendung von Teilungstechnik im Antrieb erreicht werden. Servomotoren hingegen weisen dieses Phänomen nicht auf. Ihre Regelungseigenschaften gewährleisten auch bei hohen Drehzahlen eine hervorragende Leistung. Die Moment-Frequenz-Kennlinien beider Motoren unterscheiden sich, und die Nenndrehzahl von Servomotoren ist in der Regel höher als die von Schrittmotoren.
Das Ausgangsdrehmoment des Schrittmotors nimmt mit steigender Drehzahl ab, während der Servomotor ein konstantes Ausgangsdrehmoment liefert. Daher besitzt der Schrittmotor im Allgemeinen keine Überlastfähigkeit, wohingegen der AC-Servomotor eine höhere Überlastfähigkeit aufweist.
4. Laufleistung
Schrittmotoren arbeiten im Allgemeinen mit offener Regelung. Bei zu hoher Anlauffrequenz oder zu großer Last kann es zu Schrittverlusten oder Blockierungen kommen. Um Drehzahlprobleme zu beheben oder die Encoderleistung zu erhöhen, ist eine geschlossene Regelung erforderlich. Weitere Informationen finden Sie unter „Schrittmotor mit geschlossener Regelung“. Servomotoren hingegen arbeiten mit geschlossener Regelung, sind einfacher zu steuern und weisen keine Schrittverluste auf.
5. Kosten
Schrittmotoren bieten ein gutes Preis-Leistungs-Verhältnis. Um die gleiche Funktion mit einem Servomotor zu erreichen, ist dieser teurer als ein gleich starker Schrittmotor. Die hohe Reaktionsgeschwindigkeit, die hohe Präzision und die Vorteile des Servomotors bedingen den höheren Preis des Produkts, was unvermeidlich ist.
Zusammenfassend lässt sich sagen, dass sich Schrittmotoren und Servomotoren hinsichtlich Funktionsprinzip, Steuerungsgenauigkeit, Überlastfähigkeit, Betriebsleistung und Kosten deutlich unterscheiden. Beide Motorentypen bieten jedoch ihre jeweiligen Vorteile. Anwender, die sich für einen der beiden entscheiden möchten, müssen ihre konkreten Bedürfnisse und Anwendungsszenarien sorgfältig abwägen.
Veröffentlichungsdatum: 09.11.2022