1. Was istSchrittmotor?
Schrittmotoren funktionieren anders als andere Motoren. Gleichstrom-Schrittmotoren arbeiten diskontinuierlich. In ihrem Gehäuse befinden sich mehrere Spulengruppen, sogenannte Phasen, die durch sequenzielles Aktivieren jeder Phase gedreht werden können. Schritt für Schritt.
Durch die Ansteuerung des Schrittmotors über den Controller/Computer lässt sich eine präzise Positionierung mit genauer Geschwindigkeit erreichen. Aufgrund dieses Vorteils werden Schrittmotoren häufig in Geräten eingesetzt, die eine präzise Bewegung erfordern.
Schrittmotoren gibt es in vielen verschiedenen Größen, Formen und Ausführungen. Dieser Artikel erklärt Ihnen, wie Sie den passenden Schrittmotor für Ihre Bedürfnisse auswählen.

2. Was sind die Vorteile vonSchrittmotoren?
A. PositionierungDa Schrittmotoren präzise und wiederholgenau arbeiten, eignen sie sich für eine Vielzahl von Produkten mit präziser Steuerung, wie z. B. 3D-Druck, CNC-Maschinen, Kameraplattformen usw. Auch einige Festplatten verwenden Schrittmotoren zur Positionierung des Lesekopfes.
B. Drehzahlregelung- Präzise Schritte bedeuten auch, dass Sie die Rotationsgeschwindigkeit genau steuern können, was für die Durchführung präziser Aktionen oder die Robotersteuerung geeignet ist.
C. Niedrige Drehzahl und hohes DrehmomentIm Allgemeinen weisen Gleichstrommotoren bei niedrigen Drehzahlen ein geringes Drehmoment auf. Schrittmotoren hingegen bieten ihr maximales Drehmoment bei niedrigen Drehzahlen und eignen sich daher gut für Anwendungen mit niedrigen Drehzahlen und hohen Präzisionsanforderungen.
3. Nachteile vonSchrittmotor :
A. IneffizienzIm Gegensatz zu Gleichstrommotoren ist der Stromverbrauch von Schrittmotoren weitgehend lastunabhängig. Auch im Leerlauf fließt Strom, was häufig zu Überhitzungsproblemen führt und den Wirkungsgrad verringert.
B. Drehmoment bei hoher DrehzahlNormalerweise ist das Drehmoment eines Schrittmotors bei hoher Drehzahl geringer als bei niedriger Drehzahl. Einige Motoren erreichen zwar auch bei hoher Drehzahl eine bessere Leistung, dies erfordert jedoch eine leistungsstärkere Ansteuerung.
C. Überwachung nicht möglichHerkömmliche Schrittmotoren können ihre aktuelle Position nicht erfassen oder zurückmelden; dies wird als „offener Regelkreis“ bezeichnet. Für eine Regelung mit „geschlossenem Regelkreis“ ist ein Encoder und ein Treiber erforderlich, um die präzise Drehung des Motors jederzeit zu überwachen und zu steuern. Dies ist jedoch sehr kostspielig und daher für Standardprodukte ungeeignet.
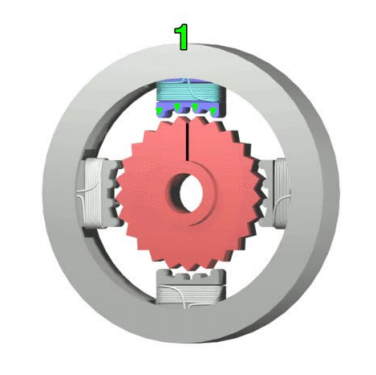
Schrittmotorphase
4. Klassifizierung der Schritte:
Es gibt viele Arten von Schrittmotoren, die für verschiedene Anwendungsbereiche geeignet sind.
Unter normalen Umständen werden jedoch in der Regel Permanentmagnetmotoren und Hybrid-Schrittmotoren eingesetzt, ohne dabei auf die Motoren von privaten Servern Rücksicht zu nehmen.
5. Motorgröße:
Bei der Auswahl eines Motors ist die Größe des Motors das erste Kriterium. Schrittmotoren reichen von 4-mm-Miniaturmotoren (die zur Steuerung der Kamerabewegung in Smartphones verwendet werden) bis hin zu riesigen Motoren wie dem NEMA 57.
Der Motor hat ein Arbeitsdrehmoment; dieses Drehmoment bestimmt, ob er Ihren Leistungsbedarf decken kann.
Beispielsweise wird NEMA17 im Allgemeinen in 3D-Druckern und kleinen CNC-Maschinen verwendet, während größere NEMA-Motoren in der industriellen Produktion zum Einsatz kommen.
NEMA17 bezieht sich hier auf den Außendurchmesser des Motors, der 17 Zoll beträgt. Dies entspricht der Größe des Zollsystems und ist umgerechnet 43 cm.
In China verwenden wir im Allgemeinen Zentimeter und Millimeter zur Messung von Abmessungen, nicht Zoll.
6. Anzahl der Motorschritte:
Die Anzahl der Schritte pro Motorumdrehung bestimmt Auflösung und Genauigkeit. Schrittmotoren haben 4 bis 400 Schritte pro Umdrehung. Üblicherweise werden 24, 48 und 200 Schritte verwendet.
Die Genauigkeit wird üblicherweise als Gradzahl jedes einzelnen Schritts beschrieben. Beispielsweise beträgt die Schrittweite eines 48-Schritt-Motors 7,5 Grad.
Die Nachteile hoher Präzision liegen jedoch in der geringeren Drehzahl und dem niedrigeren Drehmoment. Bei gleicher Frequenz ist die Drehzahl von Hochpräzisionsmotoren geringer.

7. Getriebe:
Eine weitere Möglichkeit zur Verbesserung von Genauigkeit und Drehmoment ist der Einsatz eines Getriebes.
Ein 32:1-Getriebe kann beispielsweise einen 8-Schritt-Motor in einen 256-Schritt-Präzisionsmotor umwandeln und gleichzeitig das Drehmoment um das Achtfache erhöhen.
Die Ausgabegeschwindigkeit wird sich jedoch entsprechend auf ein Achtel des ursprünglichen Wertes reduzieren.
Auch ein kleiner Motor kann durch das Untersetzungsgetriebe ein hohes Drehmoment erzeugen.
8. Schaft:
Als Letztes müssen Sie überlegen, wie Sie die Antriebswelle des Motors an Ihr Antriebssystem anpassen.
Die Wellentypen sind:
Rundwelle / D-Welle: Diese Wellenart ist die gängigste Abtriebswelle und dient zum Anschluss von Riemenscheiben, Zahnradsätzen usw. Die D-Welle eignet sich besser für hohe Drehmomente, um ein Durchrutschen zu verhindern.
Zahnradwelle: Die Abtriebswelle einiger Motoren ist ein Zahnrad, das zur Anpassung an ein bestimmtes Getriebesystem verwendet wird.
Spindelwelle: Ein Motor mit Spindelwelle dient zum Aufbau eines Linearantriebs; durch Hinzufügen eines Schiebers lässt sich eine lineare Steuerung realisieren.
Bei Interesse an unseren Schrittmotoren können Sie sich gerne an uns wenden.
Veröffentlichungsdatum: 29. Januar 2022