


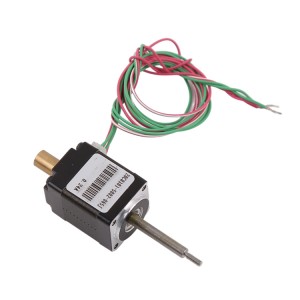
NEMA8 20-mm-Hybrid-Schrittmotor, 1,8° Schrittwinkel, D-Welle
Beschreibung
Dieser NEMA8-Motor ist ein 20 mm großer Hybrid-Schrittmotor.
Dieser Motor ist ein hochpräziser, kleiner Hybrid-Schrittmotor mit ansprechendem Aussehen und hervorragender Leistung.
Der Schrittwinkel beträgt 1,8°, was bedeutet, dass für eine Umdrehung 200 Schritte benötigt werden.
Die Motorlängen betragen 30 mm, 38 mm und 42 mm; je länger der Motor, desto höher das Drehmoment.
Die 42-mm-Variante hat ein höheres Drehmoment, während die 30-mm-Variante kleiner ist.
Kunden können die Länge entsprechend ihren Drehmoment- und Platzanforderungen wählen.
Wir bieten auch einen Anpassungsservice an.
Kunden wählen die unten aufgeführten Parameter entsprechend ihren Bedürfnissen. Bei Fragen zum Motor können Sie sich jederzeit an uns wenden; wir bieten Ihnen gerne professionelle Unterstützung.
Parameter
| Stufenwinkel (°) | Motorlänge (mm) | Haltemoment (g*cm) | Aktuell /Phase (A/Phase) |
Widerstand (Ω/Phase) | Induktivität (mH/Phase) | Anzahl führt | Rotationsinertie (g*cm2) | Gewicht (KG) |
| 1.8 | 30 | 180 | 0,6 | 6,5 | 1.7 | 4 | 1.6 | 0,06 |
| 1.8 | 38 | 300 | 0,6 | 10 | 2,5 | 4 | 2.2 | 0,08 |
| 1.8 | 42 | 300 | 0,8 | 5.4 | 1,5 | 4 | 2.9 | 0,06 |
Die oben genannten Parameter sind Standardprodukte und dienen als Referenz; der Motor kann kundenspezifisch angepasst werden.
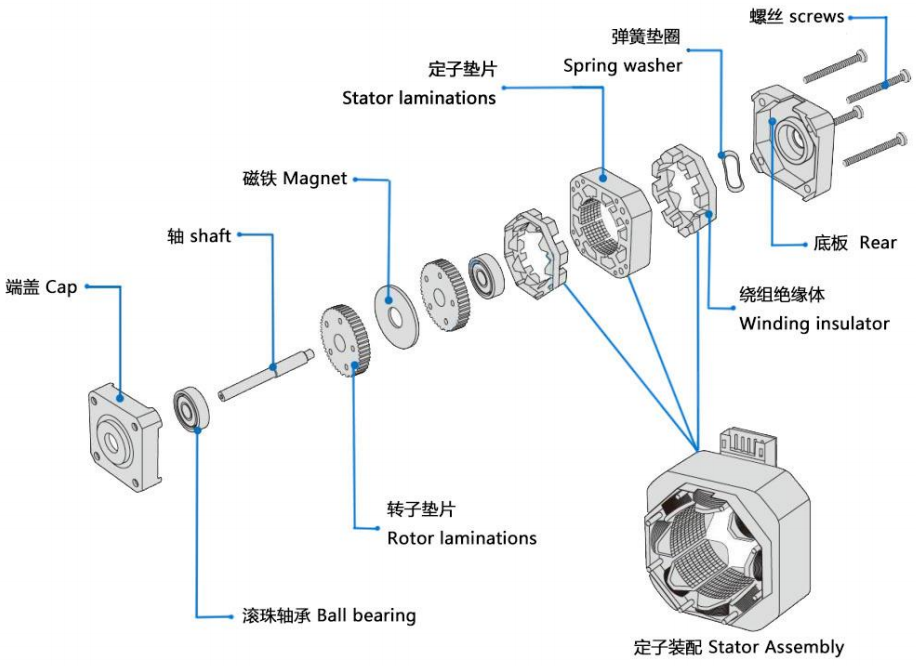
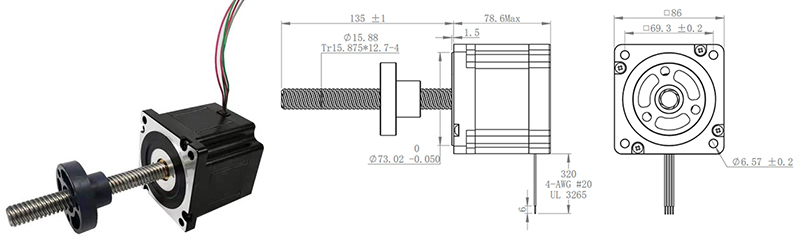
Konstruktionszeichnung
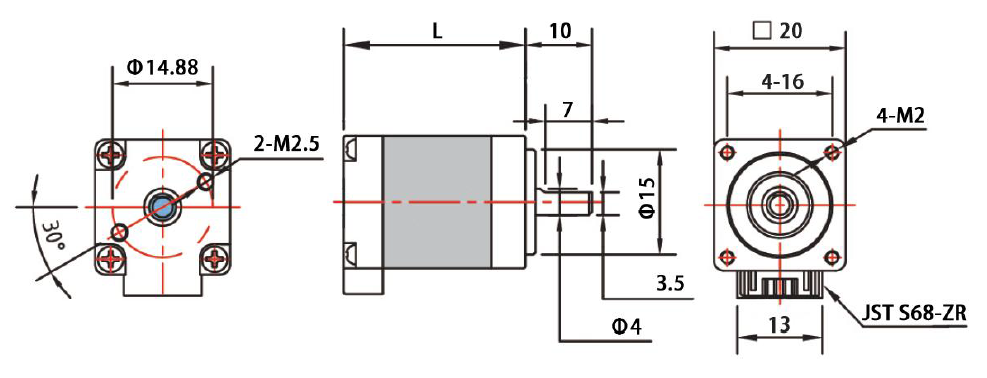
Grundstruktur von NEMA-Schrittmotoren
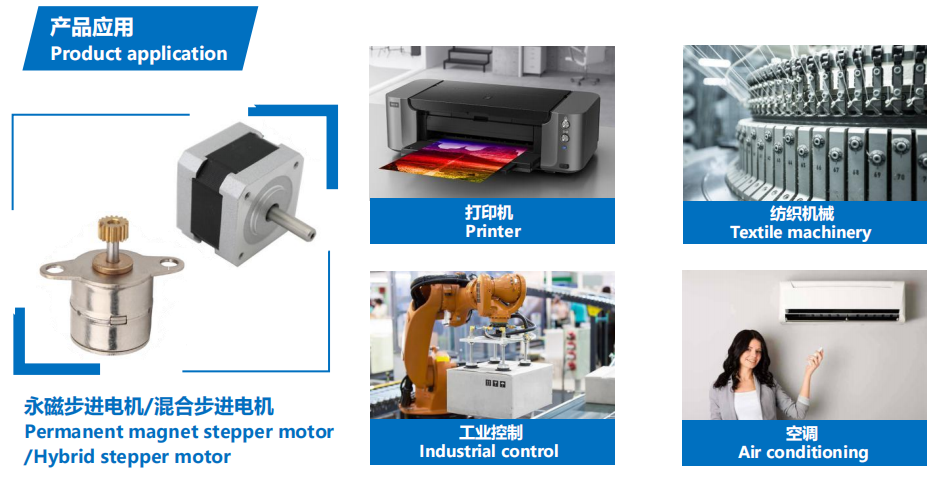
Anwendung des Hybrid-Schrittmotors
Aufgrund ihrer hohen Auflösung (200 oder 400 Schritte pro Umdrehung) werden Hybrid-Schrittmotoren häufig für Anwendungen eingesetzt, die eine hohe Präzision erfordern, wie zum Beispiel:
3D-Druck
Industriesteuerung (CNC, automatische Fräsmaschine, Textilmaschinen)
Computerperipheriegeräte
Verpackungsmaschine
Und andere automatische Systeme, die eine hochpräzise Steuerung erfordern.
Anwendungshinweise zu Hybrid-Schrittmotoren
Kunden sollten dem Prinzip folgen, „zuerst die Schrittmotoren auszuwählen und dann den Treiber basierend auf dem vorhandenen Schrittmotor auszuwählen“.
Es empfiehlt sich, den Vollschritt-Ansteuermodus nicht zum Ansteuern eines Hybrid-Schrittmotors zu verwenden, da die Vibrationen im Vollschritt-Ansteuermodus stärker sind.
Der Hybrid-Schrittmotor eignet sich besonders für Anwendungen mit niedriger Drehzahl. Wir empfehlen eine Drehzahl von maximal 1000 U/min (6666 PPS bei 0,9°), idealerweise zwischen 1000 und 3000 PPS (0,9°). Zur Drehzahlreduzierung kann ein Getriebe verwendet werden. Der Motor zeichnet sich durch hohe Effizienz und geringe Geräuschentwicklung bei geeigneter Frequenz aus.
Aus historischen Gründen wird nur bei Motoren mit einer Nennspannung von 12 V tatsächlich 12 V verwendet. Andere Nennspannungen in der Konstruktionszeichnung sind nicht unbedingt die optimale Betriebsspannung für den Motor. Kunden sollten die passende Betriebsspannung und den passenden Treiber entsprechend ihren Anforderungen auswählen.
Bei Betrieb mit hoher Drehzahl oder hoher Last erreicht der Motor in der Regel nicht direkt die Betriebsdrehzahl. Wir empfehlen, Frequenz und Drehzahl schrittweise zu erhöhen. Dies hat zwei Gründe: Erstens werden Schrittverluste vermieden, und zweitens werden Geräusche reduziert und die Positioniergenauigkeit verbessert.
Der Motor sollte nicht im Vibrationsbereich (unter 600 PPS) betrieben werden. Falls ein Betrieb mit niedriger Drehzahl erforderlich ist, kann das Vibrationsproblem durch Anpassung der Spannung oder des Stroms bzw. durch Hinzufügen von Dämpfungselementen reduziert werden.
Wenn der Motor unter 600 PPS (0,9 Grad) arbeitet, sollte er mit kleinem Strom, großer Induktivität und niedriger Spannung betrieben werden.
Bei Lasten mit einem großen Trägheitsmoment sollte ein groß dimensionierter Motor gewählt werden.
Wenn höhere Präzision erforderlich ist, kann dies durch den Einsatz eines Getriebes, eine Erhöhung der Motordrehzahl oder eine Unterteilungssteuerung erreicht werden. Auch ein Fünfphasenmotor (unipolarer Motor) wäre eine Option, jedoch ist der Preis des Gesamtsystems relativ hoch, weshalb diese Lösung selten zum Einsatz kommt.
Schrittmotorgröße:
Wir führen derzeit Hybrid-Schrittmotoren mit den Größen 20 mm (NEMA 8), 28 mm (NEMA 11), 35 mm (NEMA 14), 42 mm (NEMA 17), 57 mm (NEMA 23) und 86 mm (NEMA 34). Wir empfehlen Ihnen, bei der Auswahl eines Hybrid-Schrittmotors zunächst die Motorgröße zu bestimmen und anschließend die übrigen Parameter zu überprüfen.
Anpassungsservice
Die Konstruktion des Motors kann an die Kundenanforderungen angepasst werden, einschließlich:
Motordurchmesser: Wir haben Motoren mit 6 mm, 8 mm, 10 mm, 15 mm und 20 mm Durchmesser.
Spulenwiderstand/Nennspannung: Der Spulenwiderstand ist einstellbar, und je höher der Widerstand, desto höher ist die Nennspannung des Motors.
Halterungsdesign/ Gewindespindellänge: Wenn der Kunde eine längere/kürzere Halterung wünscht, ist dies bei speziellen Designs wie z. B. Befestigungslöchern möglich.
Leiterplatte + Kabel + Stecker: Leiterplattendesign, Kabellänge und Steckerraster sind alle anpassbar, sie können bei Bedarf durch eine flexible Leiterplatte ersetzt werden.
Lieferzeit
Wenn wir Muster auf Lager haben, können wir diese innerhalb von 3 Tagen versenden.
Falls wir keine Muster auf Lager haben, müssen wir diese anfertigen; die Produktionszeit beträgt etwa 20 Kalendertage.
Bei der Massenproduktion hängt die Lieferzeit von der Bestellmenge ab.
Zahlungsmethode und Zahlungsbedingungen
Für Muster akzeptieren wir in der Regel Paypal oder Alibaba.
Für die Massenproduktion akzeptieren wir T/T-Zahlung.
Bei Mustern verlangen wir die vollständige Zahlung vor Produktionsbeginn.
Bei der Massenproduktion akzeptieren wir eine Vorauszahlung von 50 % vor Produktionsbeginn und die restlichen 50 % werden vor dem Versand fällig.
Nach mehr als sechs gemeinsamen Bestellungen können wir über andere Zahlungsbedingungen wie z. B. A/S (nach Sicht) verhandeln.
Häufig gestellte Fragen
1. Wie lange ist die allgemeine Lieferzeit für Muster? Wie lange ist die Lieferzeit für größere Folgebestellungen?
Die Lieferzeit für Musterbestellungen beträgt etwa 15 Tage, die Lieferzeit für Großbestellungen 25-30 Tage.
2. Bieten Sie Sonderanfertigungen an?
Wir akzeptieren kundenspezifische Produktanpassungen, einschließlich Motorparameter, Anschlussdrahttyp, Abtriebswelle usw.
3. Ist es möglich, diesem Motor einen Encoder hinzuzufügen?
Bei diesem Motortyp kann ein Encoder an der Motorverschleißkappe angebracht werden.
Häufig gestellte Fragen
1. Wie kann die Wärmeentwicklung des Schrittmotors reduziert werden?
Die Reduzierung der Wärmeentwicklung erfordert die Verringerung von Kupfer- und Eisenverlusten. Kupferverluste lassen sich in zwei Richtungen reduzieren: durch Verringerung von Widerstand und Stromstärke. Dies erfordert die Auswahl eines möglichst kleinen Widerstands und Nennstroms. Bei Zweiphasenmotoren können mehrere Motoren in Reihe geschaltet werden, ohne Parallelschaltung. Dies steht jedoch oft im Widerspruch zu den Anforderungen an Drehmoment und hohe Drehzahl. Für den ausgewählten Motor sollten die automatische Halbstromregelung und die Offline-Funktion des Antriebs optimal genutzt werden. Erstere reduziert den Strom automatisch im Stillstand, letztere schaltet den Strom ab. Darüber hinaus führt die Verwendung eines Frequenzumrichters mit sinusförmiger Stromkurve und weniger Oberschwingungen zu einer geringeren Motorerwärmung. Eisenverluste lassen sich auf verschiedene Weise reduzieren, wobei die Spannungsebene eine wichtige Rolle spielt. Obwohl ein mit hoher Spannung betriebener Motor höhere Drehzahlen ermöglicht, führt dies auch zu einer höheren Wärmeentwicklung. Daher sollte die geeignete Antriebsspannung unter Berücksichtigung von Drehzahl, Laufruhe, Wärmeentwicklung, Geräuschentwicklung und anderen relevanten Parametern gewählt werden.
Senden Sie uns Ihre Nachricht:
Produktkategorien
-
20-mm-NEMA8-Linear-Hybrid-Schrittmotor mit Anlauf...
-

28-mm-NEMA11-Hybrid-Schrittmotor 1,8 Grad...
-
NEMA11 28mm linearer Hybrid-Schrittmotor ohne Kondensator...
-

Planetengetriebe-Schrittmotor 35 mm (NEMA 14) ...
-

NEMA 6 hochpräzise zweiphasige 4-Leiter 14mm Hybrid...
-

Hochpräziser 42-mm-Schrittmotor NEMA 17 Hybrid...