




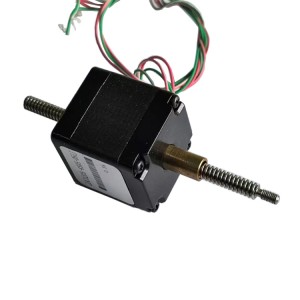
NEMA34 86-mm-Linear-Hybrid-Schrittmotor mit externem Antrieb und hoher Schubkraft
Beschreibung
Der NEMA 34 Hybrid-Schrittmotor hat eine Größe von 86 mm.
Es handelt sich außerdem um einen externen Linearschrittmotor mit einer 135 mm langen Gewindespindel an der Oberseite, zu der auch eine Kunststoffmutter/Gleitschiene passt.
Die Gewindespindel hat die Modellnummer: Tr15.875*P3.175*4N
Die Steigung der Leitspindel beträgt 3,17 mm und sie hat 4 Gänge, daher gilt: Steigung = Anzahl der Gänge * Steigung der Leitspindel = 4 * 3,175 mm = 12,7 mm
Die Schrittlänge des Motors beträgt also: 12,7 mm / 200 Schritte = 0,0635 mm/Schritt
Wir bieten auch andere Gewindespindeltypen als Option an; die Wahl hängt von den Anforderungen des Kunden an Schubkraft und Lineargeschwindigkeit des Motors ab.

Parameter
| Modellnr. | SM86C0905 |
| Motordurchmesser | 86 mm (NEMA34) |
| Ansteuerspannung | 5V DC |
| Spulenwiderstand | 1.6Ω±10%/Phase |
| Phasennummer | 2 Phasen(bipolar) |
| Stufenwinkel | 1.8°/Schritt |
| Aktueller Zinssatz | 3,12 A/Phase |
| Mindestschub (300 PPS) | 50 kg |
| Schrittlänge | 0,0635 mm/Schritt |
Parameter der Leitspindel
| Gewindespindeltyp | Trapezschraube |
| Leitspindel Modellnr. | Tr15.875*P3.175*4N |
| Außendurchmesser | 15..875 mm |
| Führen | 12,7 mm |
| Beginnt | 4 |
| Tonhöhe | 3,175 mm |
| Schrittlänge | 0,0635 mm/Schritt |
Konstruktionszeichnung
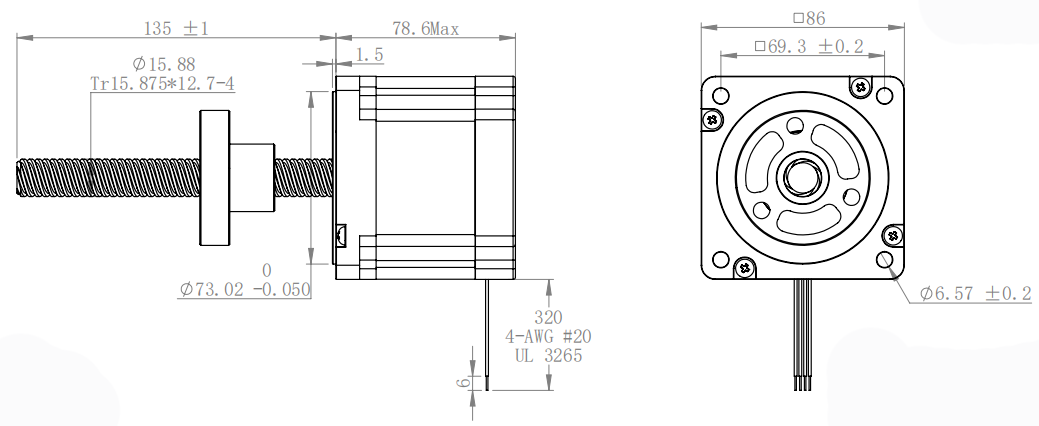
Über die Leitspindel
Die bei linearen Hybrid-Schrittmotoren verwendete Leitspindel ist im Allgemeinen eine trapezförmige Leitspindel.
Zum Beispiel für eine Tr3.5*P0.3*1N Gewindespindel.
Tr bedeutet trapezförmige Gewindespindel
P0,3 bedeutet, dass die Steigung der Leitspindel 0,3 mm beträgt.
1N bedeutet, dass es sich um eine eingängige Leitspindel handelt.
Leitspindelsteigung = Anlaufnummer * Steigung
Bei dieser speziellen Gewindespindel beträgt die Steigung 0,3 mm.
Der Schrittwinkel des Hybrid-Schrittmotors beträgt 1,8 Grad/Schritt, was 200 Schritte für eine Umdrehung erfordert.
Die Schrittlänge ist die lineare Bewegung, die der Motor bei einem einzelnen Schritt ausführt.
Bei einer 0,3-mm-Gewindespindel beträgt die Schrittlänge 0,3 mm / 200 Schritte = 0,0015 mm/Schritt
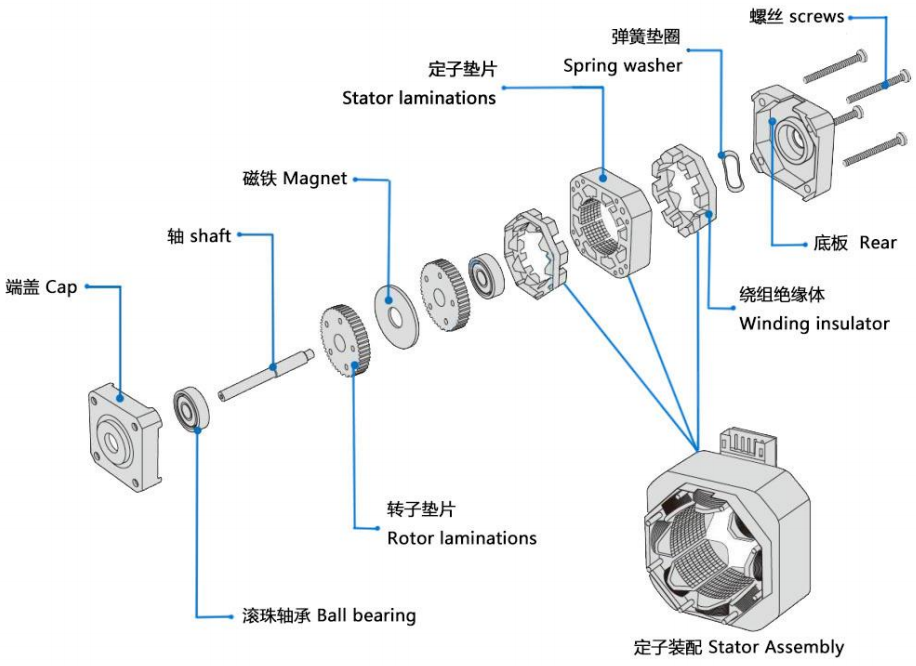
Grundstruktur von NEMA-Schrittmotoren
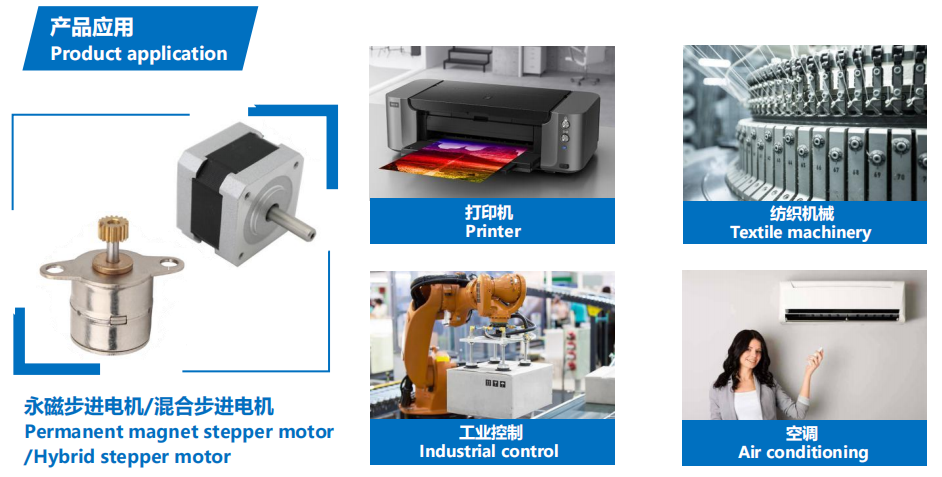
Anwendung des Hybrid-Schrittmotors
Aufgrund ihrer hohen Auflösung (200 oder 400 Schritte pro Umdrehung) werden Hybrid-Schrittmotoren häufig für Anwendungen eingesetzt, die eine hohe Präzision erfordern, wie zum Beispiel:
3D-Druck
Industriesteuerung (CNC, automatische Fräsmaschine, Textilmaschinen)
Computerperipheriegeräte
Verpackungsmaschine
Und andere automatische Systeme, die eine hochpräzise Steuerung erfordern.
Kunden sollten dem Prinzip folgen, „zuerst die Schrittmotoren auszuwählen und dann den Treiber basierend auf dem vorhandenen Schrittmotor auszuwählen“.
Es empfiehlt sich, den Vollschritt-Ansteuermodus nicht zum Ansteuern eines Hybrid-Schrittmotors zu verwenden, da die Vibrationen im Vollschritt-Ansteuermodus stärker sind.
Der Hybrid-Schrittmotor eignet sich besonders für Anwendungen mit niedriger Drehzahl. Wir empfehlen eine Drehzahl von maximal 1000 U/min (6666 PPS bei 0,9°), idealerweise zwischen 1000 und 3000 PPS (0,9°). Zur Drehzahlreduzierung kann ein Getriebe verwendet werden. Der Motor zeichnet sich durch hohe Effizienz und geringe Geräuschentwicklung bei geeigneter Frequenz aus.
Aus historischen Gründen wird nur bei Motoren mit einer Nennspannung von 12 V tatsächlich 12 V verwendet. Andere Nennspannungen in der Konstruktionszeichnung sind nicht unbedingt die optimale Betriebsspannung für den Motor. Kunden sollten die passende Betriebsspannung und den passenden Treiber entsprechend ihren Anforderungen auswählen.
Bei Betrieb mit hoher Drehzahl oder hoher Last erreicht der Motor in der Regel nicht direkt die Betriebsdrehzahl. Wir empfehlen, Frequenz und Drehzahl schrittweise zu erhöhen. Dies hat zwei Gründe: Erstens werden Schrittverluste vermieden, und zweitens werden Geräusche reduziert und die Positioniergenauigkeit verbessert.
Der Motor sollte nicht im Vibrationsbereich (unter 600 PPS) betrieben werden. Falls ein Betrieb mit niedriger Drehzahl erforderlich ist, kann das Vibrationsproblem durch Anpassung der Spannung oder des Stroms bzw. durch Hinzufügen von Dämpfungselementen reduziert werden.
Wenn der Motor unter 600 PPS (0,9 Grad) arbeitet, sollte er mit kleinem Strom, großer Induktivität und niedriger Spannung betrieben werden.
Bei Lasten mit einem großen Trägheitsmoment sollte ein groß dimensionierter Motor gewählt werden.
Wenn höhere Präzision erforderlich ist, kann dies durch den Einsatz eines Getriebes, eine Erhöhung der Motordrehzahl oder eine Unterteilungssteuerung erreicht werden. Auch ein Fünfphasenmotor (unipolarer Motor) wäre eine Option, jedoch ist der Preis des Gesamtsystems relativ hoch, weshalb diese Lösung selten zum Einsatz kommt.
Schrittmotorgröße:
Wir führen derzeit Hybrid-Schrittmotoren mit den Größen 20 mm (NEMA 8), 28 mm (NEMA 11), 35 mm (NEMA 14), 42 mm (NEMA 17), 57 mm (NEMA 23) und 86 mm (NEMA 34). Wir empfehlen Ihnen, bei der Auswahl eines Hybrid-Schrittmotors zunächst die Motorgröße zu bestimmen und anschließend die übrigen Parameter zu überprüfen.
Anpassungsservice
Die Konstruktion des Motors kann an die Kundenanforderungen angepasst werden, einschließlich:
Motordurchmesser: Wir haben Motoren mit 6 mm, 8 mm, 10 mm, 15 mm und 20 mm Durchmesser.
Spulenwiderstand/Nennspannung: Der Spulenwiderstand ist einstellbar, und je höher der Widerstand, desto höher ist die Nennspannung des Motors.
Halterungsdesign/ Gewindespindellänge: Wenn der Kunde eine längere/kürzere Halterung wünscht, ist dies bei speziellen Designs wie z. B. Befestigungslöchern möglich.
Leiterplatte + Kabel + Stecker: Leiterplattendesign, Kabellänge und Steckerraster sind alle anpassbar, sie können bei Bedarf durch eine flexible Leiterplatte ersetzt werden.
Lieferzeit
Wenn wir Muster auf Lager haben, können wir diese innerhalb von 3 Tagen versenden.
Falls wir keine Muster auf Lager haben, müssen wir diese anfertigen; die Produktionszeit beträgt etwa 20 Kalendertage.
Bei der Massenproduktion hängt die Lieferzeit von der Bestellmenge ab.
Zahlungsmethode und Zahlungsbedingungen
Für Muster akzeptieren wir in der Regel Paypal oder Alibaba.
Für die Massenproduktion akzeptieren wir T/T-Zahlung.
Bei Mustern verlangen wir die vollständige Zahlung vor Produktionsbeginn.
Bei der Massenproduktion akzeptieren wir eine Vorauszahlung von 50 % vor Produktionsbeginn und die restlichen 50 % werden vor dem Versand fällig.
Nach mehr als sechs gemeinsamen Bestellungen können wir über andere Zahlungsbedingungen wie z. B. A/S (nach Sicht) verhandeln.
Häufig gestellte Fragen
1. Wie lange ist die allgemeine Lieferzeit für Muster? Wie lange ist die Lieferzeit für größere Folgebestellungen?
Die Lieferzeit für Musterbestellungen beträgt etwa 15 Tage, die Lieferzeit für Großbestellungen 25-30 Tage.
2. Bieten Sie Sonderanfertigungen an?
Wir akzeptieren kundenspezifische Produktanpassungen, einschließlich Motorparameter, Anschlussdrahttyp, Abtriebswelle usw.
3. Ist es möglich, diesem Motor einen Encoder hinzuzufügen?
Bei diesem Motortyp kann ein Encoder an der Motorverschleißkappe angebracht werden.
Häufig gestellte Fragen
1. Worin besteht der Unterschied zwischen bipolarer und unipolarer Verdrahtung von Schrittmotoren?
Schrittmotoren mit bipolarer Ansteuerung nutzen eine Ansteuermethode, bei der der Strom in einer Wicklung in beide Richtungen fließt (bipolare Ansteuerung).
Ein Schrittmotor mit einpoliger Ansteuerung besitzt einen zentralen Abgriff und verwendet eine Ansteuermethode, bei der der Strom in einer Wicklung immer in einer festen Richtung fließt (einpolige Ansteuerung).
2. Schrittmotor im Start-Stopp-Betriebsmodus startet nicht – Gründe und Lösungsansätze
a. Die Last ist zu groß: Fehler bei der Motorauswahl, wählen Sie einen Motor mit größerer Dimensionierung.
b. Die Frequenz ist zu hoch: Reduzieren Sie die Frequenz.
c. Wenn der Motor hin und her schwingt oder das Drehmoment sehr gering ist, was auf einen Phasenausfall oder eine Unterbrechung des Stromkreises hindeutet: Ersetzen oder reparieren Sie den Motor.
d. Phasenstrom nicht ausreichend: Erhöhen Sie den Phasenstrom, zumindest für die ersten Anlaufschritte.
3. Ursachen und Lösungen für Schrittmotoren, die zwar beschleunigen, aber aufhören zu rotieren, sobald sie eine stabile Drehzahl erreicht haben.
Ursache: Der Schrittmotor arbeitet an seiner Leistungsgrenze und stoppt aufgrund übermäßiger Beschleunigung. Der Rotor vibriert und läuft unruhig.
Lösung.
①Reduzieren Sie die Beschleunigung, d. h. wählen Sie eine niedrigere Beschleunigung oder verwenden Sie zwei unterschiedliche Beschleunigungsstufen, eine höhere am Anfang und eine niedrigere in der Nähe der Höchstgeschwindigkeit.
②Erhöhen Sie das Drehmoment
③Ein mechanischer Dämpfer an der hinteren Welle wird hinzugefügt, wodurch sich jedoch die Rotorträgheit erhöht.
④ Machen Sie eine Fahrt durch ein Neubaugebiet
Senden Sie uns Ihre Nachricht:
Produktkategorien
-
NEMA11 28mm linearer Hybrid-Schrittmotor ohne Kondensator...
-

28-mm-NEMA11-Hybrid-Schrittmotor 1,8 Grad...
-

Hochpräziser 42-mm-Schrittmotor NEMA 17 Hybrid...
-
20-mm-NEMA8-Linear-Hybrid-Schrittmotor mit Anlauf...
-

Planetengetriebe-Schrittmotor 35 mm (NEMA 14) ...
-

Drehmomentstarker NEMA 23 Hybrid-Schrittmotor 57 mm m...