.jpg)
.jpg)
.jpg)
.jpg)
Nema 34 (86 mm) Hybrid-Schrittmotor, bipolar, 4-adrig, ACME-Gewindespindel, geräuscharm, lange Lebensdauer, Formical Equipment
Beschreibung
Dieser 86-mm-Hybrid-Schrittmotor ist in drei Ausführungen erhältlich: extern angetrieben, mit durchgehender Achse und mit durchgehender fester Achse. Sie können die für Ihre Bedürfnisse passende Ausführung auswählen.
Der ACME-Gewindespindel-Schrittmotor wandelt mithilfe einer Gewindespindel eine Drehbewegung in eine lineare Bewegung um; die Gewindespindel verfügt über verschiedene Kombinationen von Durchmesser und Steigung, um unterschiedlichen Anwendungsanforderungen gerecht zu werden.
Gewindespindel-Schrittmotoren werden typischerweise in Anwendungen eingesetzt, die präzise lineare Bewegungen, geringe Geräuschentwicklung und hohe Kosteneffizienz erfordern, wie z. B. medizinische Geräte, Telekommunikationsgeräte usw.
ThinkerMotion bietet ein umfassendes Sortiment an Gewindespindel-Schrittmotoren (NEMA 8, NEMA 11, NEMA 14, NEMA 17, NEMA 23, NEMA 24, NEMA 34) mit einem Lastbereich von 30 N bis 2400 N. Drei Ausführungen sind verfügbar (extern, fest montiert, nicht fest montiert). Kundenspezifische Anpassungen wie Gewindelänge und -ende, Magnetbremse, Encoder, spielfreie Mutter usw. sind auf Anfrage möglich. Die Gewindespindel kann zudem mit Teflon beschichtet werden.

Beschreibungen
| Produktname | 86-mm-Hybrid-Schrittmotoren |
| Modell | VSM86HSM |
| Typ | Hybrid-Schrittmotoren |
| Stufenwinkel | 1,8° |
| Spannung (V) | 3/4,8 |
| Stromstärke (A) | 6 |
| Widerstand (Ohm) | 0,5/0,8 |
| Induktivität (mH) | 4/8,5 |
| Anschlussdrähte | 4 |
| Motorlänge (mm) | 76/114 |
| Umgebungstemperatur | -20℃ ~ +50℃ |
| Temperaturanstieg | 80.000 Max. |
| Durchschlagsfestigkeit | 1 mA Max. bei 500 V, 1 kHz, 1 Sek. |
| Isolationswiderstand | Mindestens 100 MΩ bei 500 V DC |
Zertifizierungen

Elektrische Parameter:
| Motorgröße | Stromspannung /Phase (V) | Aktuell /Phase (A) | Widerstand /Phase (Ω) | Induktivität /Phase (mH) | Anzahl Anschlussdrähte | Rotorträgheit (g.cm2) | Motorgewicht (G) | Motorlänge L (mm) |
| 86 | 3 | 6 | 0,5 | 4 | 4 | 1300 | 2400 | 76 |
| 86 | 4.8 | 6 | 0,8 | 8,5 | 4 | 2500 | 5000 | 114 |
Spezifikationen und Leistungsparameter der Leitspindel
| Durchmesser (mm) | Führen (mm) | Schritt (mm) | Selbstverriegelungskraft bei Stromausfall (N) |
| 15,875 | 2,54 | 0,0127 | 2000 |
| 15,875 | 3,175 | 0,015875 | 1500 |
| 15,875 | 6,35 | 0,03175 | 200 |
| 15,875 | 12.7 | 0,0635 | 50 |
| 15,875 | 25.4 | 0,127 | 20 |
Hinweis: Für weitere Spezifikationen zu Gewindespindeln kontaktieren Sie uns bitte.
VSM86HSM Standard-Außenmotor-Umrisszeichnung
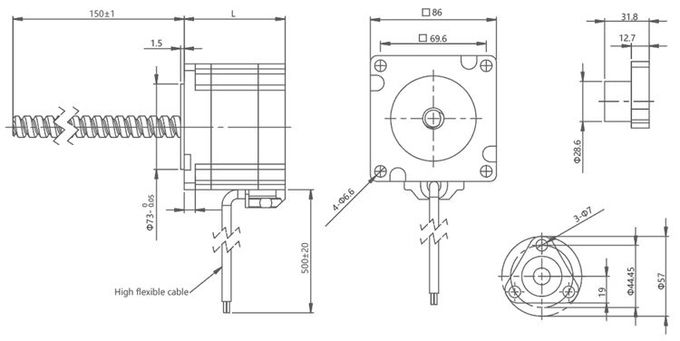
Anmerkungen:
Die Länge der Leitspindel kann individuell angepasst werden.
Eine kundenspezifische Bearbeitung ist am Ende der Gewindespindel möglich.
Standard-Umrisszeichnung eines 86-mm-Hybrid-Schrittmotors mit feststehendem Motor:
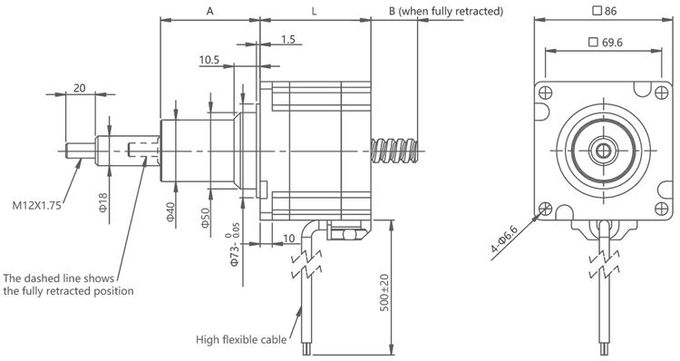
Anmerkungen:
Eine kundenspezifische Bearbeitung ist am Ende der Gewindespindel möglich.
| Schlaganfall S (mm) | Dimension A (mm) | Abmessung B (mm) | |
| L = 76 | L = 114 | ||
| 12.7 | 29,7 | 0 | 0 |
| 19.1 | 36.1 | 2.1 | 0 |
| 25.4 | 42,4 | 8.4 | 0 |
| 31,8 | 48,8 | 14.8 | 0 |
| 38.1 | 55.1 | 21.1 | 0 |
| 50,8 | 67,8 | 33,8 | 0 |
| 63,5 | 80,5 | 46,5 | 8,5 |
86-mm-Hybrid-Schrittmotor Standard-Durchsteckmotor Umrisszeichnung
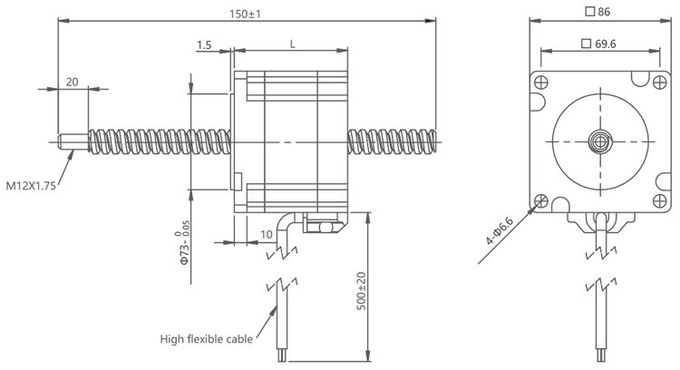
Anmerkungen:
Die Länge der Leitspindel kann individuell angepasst werden.
Eine kundenspezifische Bearbeitung ist am Ende der Gewindespindel möglich.
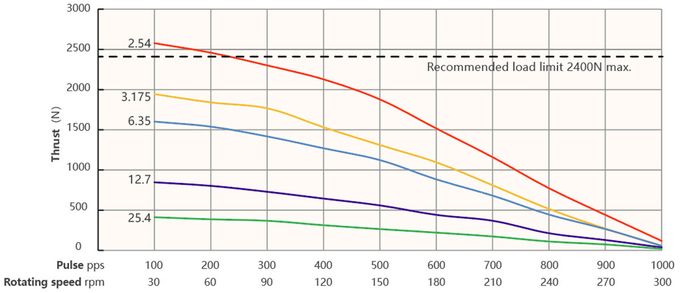
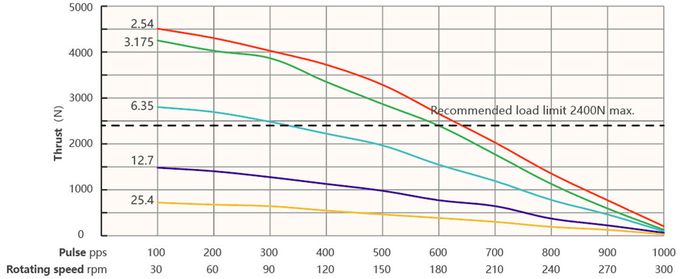
Geschwindigkeits- und Schubkurve:
86er Serie, 76 mm Motorlänge, bipolarer Chopper-Antrieb
100 % Stromimpulsfrequenz- und Schubkurve (Φ15,88 mm Gewindespindel)
86er Serie, 114 mm Motorlänge, bipolarer Chopper-Antrieb
100 % Stromimpulsfrequenz- und Schubkurve (Φ15,88 mm Gewindespindel)
| Leitungslänge (mm) | Lineare Geschwindigkeit (mm/s) | |||||||||
| 2,54 | 1.27 | 2,54 | 3,81 | 5.08 | 6,35 | 7,62 | 8,89 | 10.16 | 11.43 | 12.7 |
| 3,175 | 1,5875 | 3,175 | 4,7625 | 6,35 | 7,9375 | 9,525 | 11.1125 | 12.7 | 14,2875 | 15,875 |
| 6,35 | 3,175 | 6,35 | 9,525 | 12.7 | 15,875 | 19.05 | 22,225 | 25.4 | 28,575 | 31,75 |
| 12.7 | 6,35 | 12.7 | 19.05 | 25.4 | 31,75 | 38.1 | 44,45 | 50,8 | 57,15 | 63,5 |
| 25.4 | 12.7 | 25.4 | 38.1 | 50,8 | 63,5 | 76,2 | 88,9 | 101,6 | 114,3 | 127 |
Testbedingungen:
Chopper-Antrieb, keine Rampenfunktion, Halb-Mikroschrittbetrieb, Ansteuerspannung 40 V
Anwendungsgebiete
CNC-Werkzeugmaschinen:86-mm-Hybrid-Schrittmotoren werden in CNC-Werkzeugmaschinen häufig zur Steuerung der Bewegung und Position von Schneidwerkzeugen eingesetzt, um hochpräzise Bearbeitungsvorgänge zu realisieren.
Automatisierungsanlagen:86-mm-Hybrid-Schrittmotoren können in verschiedenen Automatisierungsanlagen, wie z. B. automatischen Verpackungsmaschinen, automatischen Sortieranlagen, automatisierten Produktionslinien usw., zur Steuerung von Bewegung und Positionierung eingesetzt werden.
3D-Druck:Im Bereich des 3D-Drucks werden 86-mm-Hybrid-Schrittmotoren eingesetzt, um die Position und Bewegung des Druckkopfes zu steuern und so präzise Druckvorgänge zu realisieren.
Medizinprodukte:86-mm-Hybrid-Schrittmotoren werden in medizinischen Geräten wie medizinischen Spritzenpumpen, medizinischen Robotern, medizinischen Scannern usw. zur präzisen Positions- und Bewegungssteuerung eingesetzt.
Telekommunikationsausrüstung:86-mm-Hybrid-Schrittmotoren können für die präzise Positionierung und Steuerung in Telekommunikationsgeräten eingesetzt werden, beispielsweise für das Positionierungssystem von Kommunikationsantennen oder die präzise Steuerung von Glasfasergeräten.
Textilmaschinen:In der Textilindustrie können 86-mm-Hybrid-Schrittmotoren zur Steuerung von Spinnmaschinen, Webstühlen und anderen Anlagen eingesetzt werden, um die Genauigkeit und Stabilität des Textilprozesses zu gewährleisten.
Robotik:86-mm-Hybrid-Schrittmotoren können in einer Vielzahl von Robotikanwendungen eingesetzt werden, darunter Industrieroboter, Serviceroboter, kollaborative Roboter usw., um präzise Bewegungen und Operationen zu ermöglichen.
Automatisierte Lagersysteme:In automatisierten Lager- und Logistiksystemen können 86-mm-Hybrid-Schrittmotoren zur Steuerung von Förderbändern, Aufzügen, Stapler und anderen Geräten eingesetzt werden, um eine genaue Positionierung und Handhabung von Artikeln zu erreichen.
Vorteil
Gleichmäßige und präzise Bewegung:86-mm-Hybrid-Schrittmotoren ermöglichen dank ihrer hohen Schrittauflösung eine gleichmäßige und präzise Bewegung. Dies gewährleistet eine genaue Positionierung und ruckfreie Ausführung, reduziert das Risiko von Vibrationen und sichert eine hohe Leistungsqualität.
Hohes Drehmoment bei niedrigen Drehzahlen:Hybrid-Schrittmotoren liefern auch bei niedrigen Drehzahlen ein hohes Drehmoment und eignen sich daher für Anwendungen, die ein starkes Halte- oder Anlaufdrehmoment erfordern. Diese Eigenschaft ist besonders vorteilhaft, wenn der Motor seine Position gegen äußere Kräfte halten muss.
Breites Spektrum an Schrittauflösungen:86-mm-Hybrid-Schrittmotoren bieten ein breites Spektrum an Schrittauflösungen und ermöglichen so eine präzise Bewegungssteuerung. Durch den Einsatz von Mikroschrittverfahren kann der Motor jeden Schritt in kleinere Teilschritte unterteilen, was zu einer gleichmäßigeren Bewegung und verbesserter Positioniergenauigkeit führt.
Einfache Ansteuerung und Steuerung: Hybrid-Schrittmotoren verfügen über eine einfache Ansteuer- und Steuerungsarchitektur, die typischerweise mit Impuls- und Richtungssignalen arbeitet. Dadurch lassen sie sich leicht in verschiedene Steuerungssysteme integrieren, was Komplexität und Entwicklungszeit reduziert.
Hohe Zuverlässigkeit und Langlebigkeit:86-mm-Hybrid-Schrittmotoren sind für ihre Robustheit und lange Lebensdauer bekannt. Sie widerstehen anspruchsvollen Betriebsbedingungen wie Temperaturschwankungen und mechanischen Belastungen, ohne Leistungseinbußen hinnehmen zu müssen.
Kostengünstige Lösung:Hybrid-Schrittmotoren bieten im Vergleich zu anderen Bewegungssteuerungstechnologien, wie beispielsweise Servomotoren, eine kostengünstige Lösung. Sie bieten ein gutes Verhältnis zwischen Leistung und Kosten und eignen sich daher für Anwendungen, bei denen Budgetaspekte eine wichtige Rolle spielen.
Vielseitige Anwendungsmöglichkeiten:86-mm-Hybrid-Schrittmotoren finden in verschiedenen Branchen Anwendung, darunter Robotik, Automatisierung, Fertigung, 3D-Druck, Medizintechnik und mehr. Ihre Vielseitigkeit ermöglicht ihren Einsatz in einer breiten Palette von Anwendungen, die eine präzise Positionierung und Steuerung erfordern.
Anforderungen an die Motorenauswahl:
►Bewegungs-/Montagerichtung
►Lastanforderungen
►Anforderungen an die Schlaganfallbehandlung
►Anforderungen an die Endbearbeitung
►Präzisionsanforderungen
►Anforderungen an das Encoder-Feedback
►Manuelle Einstellanforderungen
►Umweltanforderungen
Produktionswerkstatt


-300x300.jpg)
-300x300.jpg)
-300x300.jpg)
-300x300.jpg)
-300x300.jpg)