





Nema 17 (42 mm) Hybrid-Kugelgewindetrieb-Schrittmotor, 1,8° Schrittwinkel, Spannung 2,1 / 3,7 V, Strom 1 A, 4 Anschlussdrähte
Nema 17 (42 mm) Hybrid-Kugelgewindetrieb-Schrittmotor, 1,8° Schrittwinkel, Spannung 2,1 / 3,7 V, Strom 1 A, 4 Anschlussdrähte
Nema 17 (42 mm) Hybrid-Schrittmotor, bipolar, 4-adrig, Kugelgewindetrieb, geräuscharm, lange Lebensdauer, hohe Leistung, CE- und RoHS-zertifiziert.
Beschreibung
| Produktname | 42-mm-Hybrid-Kugelgewindetrieb-Schrittmotor |
| Modell | VSM42BSHSM |
| Typ | Hybrid-Schrittmotoren |
| Stufenwinkel | 1,8° |
| Spannung (V) | 2,6 / 3,3 / 2 / 2,5 |
| Stromstärke (A) | 1,5 / 2,5 |
| Widerstand (Ohm) | 1,8 / 2,2 / 0,8 / 1 |
| Induktivität (mH) | 2,6 / 4,6 / 1,8 / 2,8 |
| Anschlussdrähte | 4 |
| Motorlänge (mm) | 34 / 40 / 48 / 60 |
| Umgebungstemperatur | -20℃ ~ +50℃ |
| Temperaturanstieg | 80.000 Max. |
| Durchschlagsfestigkeit | 1 mA Max. bei 500 V, 1 kHz, 1 Sek. |
| Isolationswiderstand | Mindestens 100 MΩ bei 500 V DC |
Zertifizierungen

Elektrische Parameter:
| Motorgröße | Stromspannung /Phase (V) | Aktuell /Phase (A) | Widerstand /Phase (Ω) | Induktivität /Phase (mH) | Anzahl Anschlussdrähte | Rotorträgheit (g.cm2) | Motorgewicht (G) | Motorlänge L (mm) |
| 42 | 2.6 | 1,5 | 1.8 | 2.6 | 4 | 35 | 250 | 34 |
| 42 | 3.3 | 1,5 | 2.2 | 4.6 | 4 | 55 | 290 | 40 |
| 42 | 2 | 2,5 | 0,8 | 1.8 | 4 | 70 | 385 | 48 |
| Motorgröße | Stromspannung /Phase (V) | Aktuell /Phase (A) | Widerstand /Phase (Ω) | Induktivität /Phase (mH) | Anzahl Anschlussdrähte | Rotorträgheit (g.cm2) | Motorgewicht (G) | Motorlänge L (mm) |
| 42 | 2.6 | 1,5 | 1.8 | 2.6 | 4 | 35 | 250 | 34 |
| 42 | 3.3 | 1,5 | 2.2 | 4.6 | 4 | 55 | 290 | 40 |
| 42 | 2 | 2,5 | 0,8 | 1.8 | 4 | 70 | 385 | 48 |
| 42 | 2,5 | 2,5 | 1 | 2.8 | 4 | 105 | 450 | 60 |
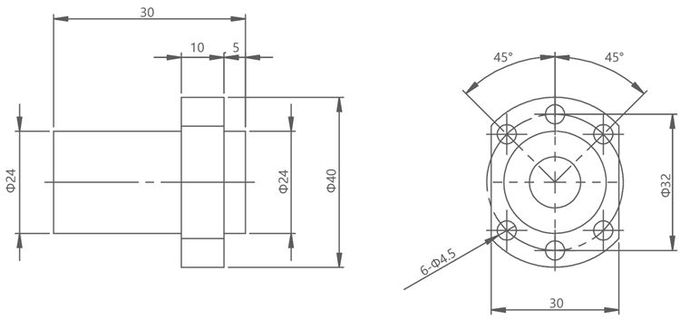
Standard-Außenmotor VSM42BSHSM – Umrisszeichnung:
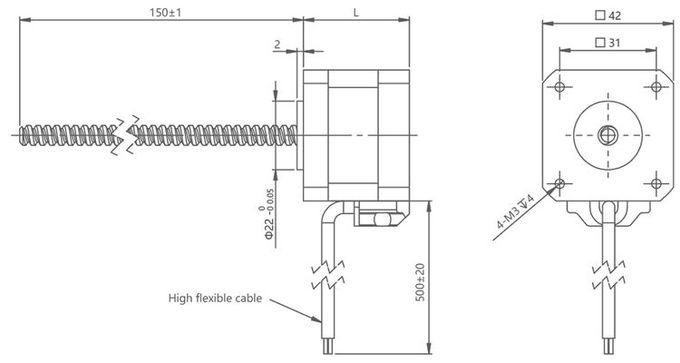
Anmerkungen:
Die Länge der Leitspindel kann individuell angepasst werden.
Eine kundenspezifische Bearbeitung ist am Ende der Gewindespindel möglich.
Für weitere Spezifikationen zu Kugelgewindetrieben kontaktieren Sie uns bitte.
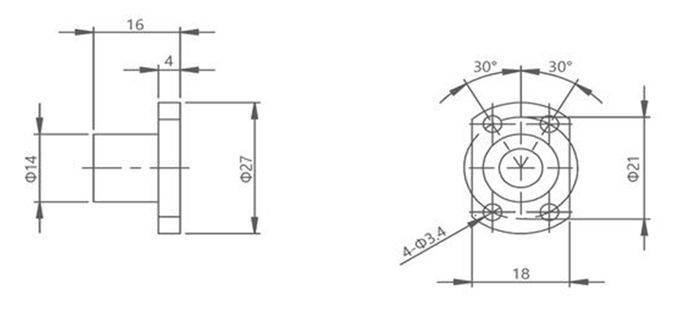
VSM42BSHSMBallmutter 0801 oder 0802 Umrisszeichnung
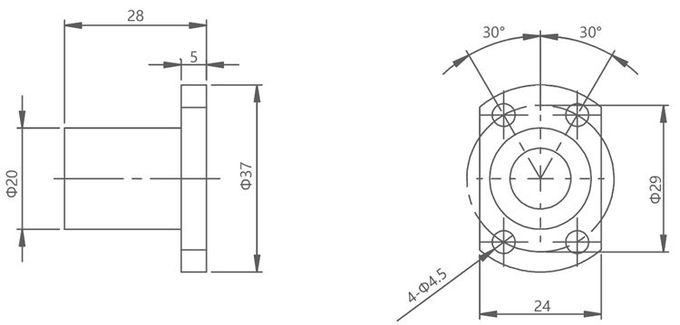
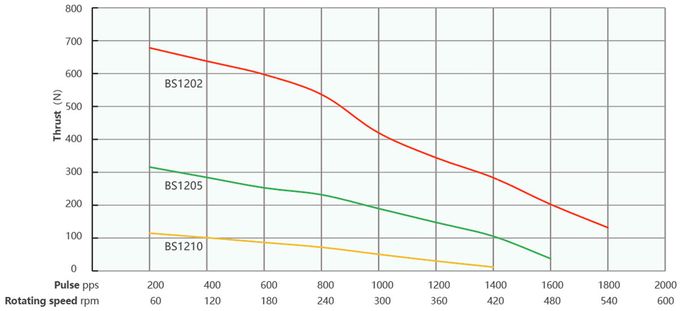
VSM42BSHSMBall Nut 1202 Umrisszeichnung:
VSM42BSHSMBall Nut 1205 Umrisszeichnung:
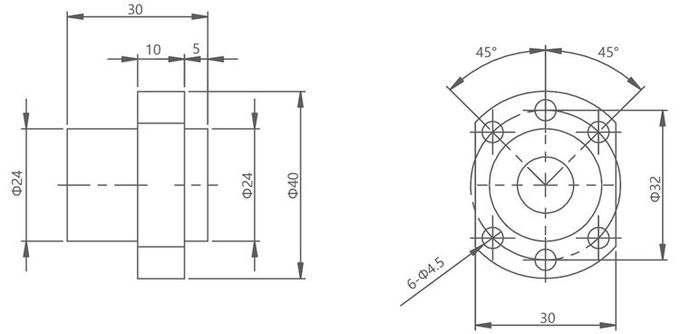
VSM42BSHSMBall Nut 1210 Umrisszeichnung:
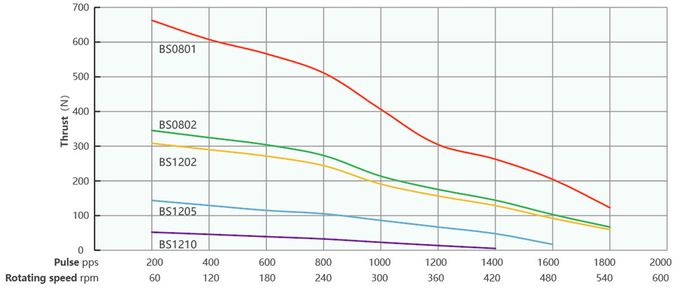
Geschwindigkeits- und Schubkurve
42er Serie, 34 mm Motorlänge, bipolarer Chopper-Antrieb
100 % Stromimpulsfrequenz- und Schubkurve
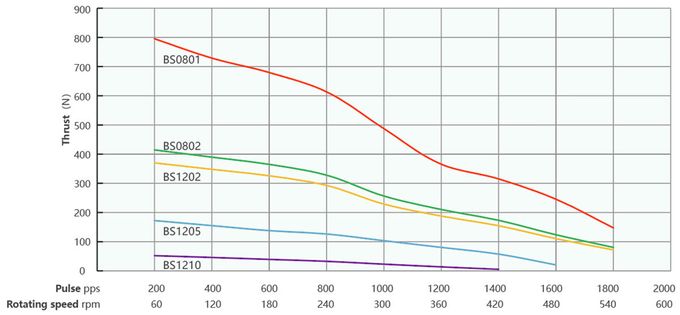
42er Serie, 40 mm Motorlänge, bipolarer Chopper-Antrieb
100 % Stromimpulsfrequenz- und Schubkurve
| Leitungslänge (mm) | Lineare Geschwindigkeit (mm/s) | |||||||||
| 1 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 |
| 2 | 2 | 4 | 6 | 8 | 10 | 12 | 14 | 16 | 18 | 20 |
| 5 | 5 | 10 | 15 | 20 | 25 | 30 | 35 | 40 | 45 | 50 |
| 10 | 10 | 20 | 30 | 40 | 50 | 60 | 70 | 80 | 90 | 100 |
Testbedingungen:Chopper-Antrieb, keine Rampenfunktion, Halb-Mikroschrittbetrieb, Ansteuerspannung 40 V
42er Serie, 48 mm Motorlänge, bipolarer Chopper-Antrieb
100 % Stromimpulsfrequenz- und Schubkurve
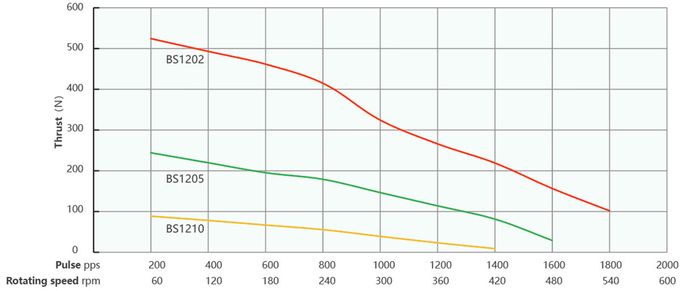
42er Serie, 60 mm Motorlänge, bipolarer Chopper-Antrieb
100 % Stromimpulsfrequenz- und Schubkurve
| Leitungslänge (mm) | Lineare Geschwindigkeit (mm/s) | |||||||||
| 1 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 |
| 2 | 2 | 4 | 6 | 8 | 10 | 12 | 14 | 16 | 18 | 20 |
| 5 | 5 | 10 | 15 | 20 | 25 | 30 | 35 | 40 | 45 | 50 |
| 10 | 10 | 20 | 30 | 40 | 50 | 60 | 70 | 80 | 90 | 100 |
Testbedingungen:Chopper-Antrieb, keine Rampenfunktion, Halb-Mikroschrittbetrieb, Ansteuerspannung 40 V
Anwendungsgebiete:
Automatisierungsanlagen:Diese Motoren eignen sich für eine Vielzahl von Automatisierungsanlagen, beispielsweise für automatisierte Montagelinien, Verpackungsmaschinen, automatisierte Lagersysteme und vieles mehr. Sie ermöglichen eine hochpräzise Positionierung und zuverlässige Bewegungssteuerung für die exakte Handhabung und Positionierung von Werkstücken.
3D-Drucker:42-mm-Hybrid-Kugelgewindetrieb-Schrittmotoren eignen sich für die beweglichen Achsen von 3D-Druckern und ermöglichen die präzise Positionierung und Bewegungssteuerung des Druckkopfes. Dank der präzisen Positionssteuerung lassen sich hochwertige Druckergebnisse erzielen.
CNC-Werkzeugmaschinen:Diese Motoren eignen sich für die Bewegungsachsen von CNC-Werkzeugmaschinen wie XYZ-Positioniertischen, Fräsmaschinen und Graviermaschinen. Sie bieten hohe Genauigkeit, hohes Drehmoment und zuverlässige Bewegungssteuerung für präzise Bearbeitung und Gravur.
Medizinische Geräte:42-mm-Hybrid-Kugelgewindetrieb-Schrittmotoren eignen sich für medizinische Geräte wie Bildgebungsgeräte, Operationsroboter und automatisierte medizinische Instrumente. Sie ermöglichen eine präzise Positionssteuerung und stabile Bewegungen für die Feinmanipulation und Automatisierung medizinischer Prozesse.
Textilmaschinen:Diese Motoren können für verschiedene Bewegungsachsen in Textilmaschinen wie Webstühlen, Nähmaschinen, Stickmaschinen usw. eingesetzt werden. Sie ermöglichen schnelle und präzise Bewegungen für die Herstellung und Verarbeitung von Textilien.
Robotik:42-mm-Hybrid-Kugelgewindetrieb-Schrittmotoren werden in Gelenken und Aktuatoren von Robotern eingesetzt. Sie ermöglichen eine präzise Positionssteuerung und ein hohes Drehmoment und werden zur Realisierung genauer Bewegungen und des Betriebs von Robotern verwendet.
Vorteil
Hohe Positioniergenauigkeit:42-mm-Hybrid-Kugelgewindetrieb-Schrittmotoren bieten eine hohe Positioniergenauigkeit. Das Kugelgewindetrieb-Getriebe reduziert das Umkehrspiel und verbessert so Präzision und Wiederholgenauigkeit. Dadurch kann der Motor die gewünschte Position exakt erreichen und halten, was in Anwendungen, die eine präzise Positionierung erfordern, entscheidend ist.
Erhöhtes Drehmoment:Diese Motoren bieten ein höheres Drehmoment als herkömmliche Schrittmotoren. Der Kugelgewindetrieb wandelt die Drehbewegung des Motors effizient in eine Linearbewegung um, was zu einer verbesserten Drehmomentübertragung führt. Dadurch kann der Motor größere Lasten antreiben oder höhere Widerstände überwinden und eignet sich somit für Anwendungen mit hohen Drehmomentanforderungen.
Erhöhte Ladekapazität:Das Kugelgewindetriebsystem dieser Motoren sorgt für eine verbesserte Tragfähigkeit. Die Konstruktion verteilt die Last entlang der Gewindespindel, wodurch der Motor höhere Lasten bewältigen und im Betrieb stabil bleiben kann. Dadurch eignen sie sich für Anwendungen, bei denen schwere Lasten bewegt oder in anspruchsvollen Umgebungen gearbeitet wird.
Reduziertes Spiel:Das Spiel zwischen Spindel und Mutter in einem Getriebesystem wird als Umkehrspiel bezeichnet. Der in diesen Motoren verwendete Kugelgewindetrieb minimiert das Umkehrspiel und verbessert so die Bewegungssteuerung und Positioniergenauigkeit. Durch das reduzierte Umkehrspiel reagiert der Motor präzise auf Steuersignale und eignet sich daher ideal für Anwendungen, die eine exakte Bewegungssteuerung erfordern.
Höhere Effizienz:Hybrid-Kugelgewindetrieb-Schrittmotoren bieten im Vergleich zu herkömmlichen Schrittmotoren einen höheren Wirkungsgrad. Das Kugelgewindetrieb-Getriebe reduziert die Reibung, was zu einer verbesserten Energieumwandlung und geringeren Leistungsverlusten führt. Dies resultiert in einem höheren Gesamtwirkungsgrad und einem geringeren Stromverbrauch, wodurch sie kostengünstiger und umweltfreundlicher sind.
Reibungsloser Betrieb:Der Kugelgewindetrieb ermöglicht im Vergleich zu anderen Antriebssystemen eine gleichmäßigere und präzisere Linearbewegung. Dieser ruhige Lauf reduziert Vibrationen und Geräusche während des Motorbetriebs und gewährleistet so einen leiseren und stabileren Betrieb. Daher eignen sich diese Motoren besonders für Anwendungen, bei denen Geräusche und Vibrationen minimiert werden müssen.
Langlebigkeit und Zuverlässigkeit:42-mm-Hybrid-Kugelgewindetrieb-Schrittmotoren sind auf Langlebigkeit und lange Lebensdauer ausgelegt. Der Kugelgewindetrieb gewährleistet in Kombination mit hochwertigen Komponenten eine zuverlässige und konstante Leistung auch unter anspruchsvollen Betriebsbedingungen. Dies führt zu einem reduzierten Wartungsaufwand und einer erhöhten Systemzuverlässigkeit.
Anforderungen an die Motorenauswahl:
►Bewegungs-/Montagerichtung
►Lastanforderungen
►Anforderungen an die Schlaganfallbehandlung
►Anforderungen an die Endbearbeitung
►Präzisionsanforderungen
►Anforderungen an das Encoder-Feedback
►Manuelle Einstellanforderungen
►Umweltanforderungen
Produktionswerkstatt






