.jpg)
.jpg)
.jpg)
.jpg)
Nema 11 (28 mm) Hybrid-Schrittmotor, bipolar, 4-adrig, ACME-Gewindespindel, geräuscharm, lange Lebensdauer, hohe Leistung.
Nema 11 (28 mm) Hybrid-Schrittmotor, bipolar, 4-adrig, ACME-Gewindespindel, geräuscharm, lange Lebensdauer, hohe Leistung.
Dieser 28-mm-Hybrid-Schrittmotor ist in drei Ausführungen erhältlich: extern angetrieben, mit durchgehender Achse und mit durchgehender fester Achse. Sie können die für Ihre Bedürfnisse passende Ausführung auswählen.
Maximaler Schub bis zu 240 kg, geringe Temperaturerhöhung, geringe Vibration, geringe Geräuschentwicklung, lange Lebensdauer (bis zu 5 Millionen Zyklen) und hohe Positioniergenauigkeit (bis zu ±0,01 mm).
Standard-Außenmotor VSM28HSM – Umrisszeichnung:
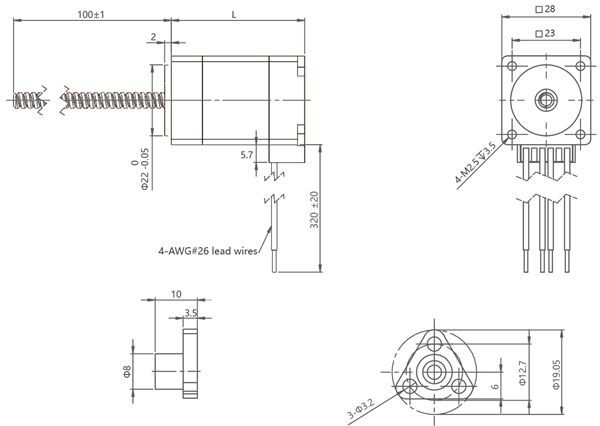
Anmerkungen:
Die Länge der Leitspindel kann individuell angepasst werden.
Eine kundenspezifische Bearbeitung ist am Ende der Gewindespindel möglich.
Beschreibungen
| Produktname | 20-mm-Hybrid-Schrittmotoren mit externem Antrieb |
| Modell | VSM20HSM |
| Typ | Hybrid-Schrittmotoren |
| Stufenwinkel | 1,8° |
| Spannung (V) | 2,5 / 6,3 |
| Stromstärke (A) | 0,5 |
| Widerstand (Ohm) | 5,1 / 12,5 |
| Induktivität (mH) | 1,5 / 4,5 |
| Anschlussdrähte | 4 |
| Haltemoment (Nm) | 0,02 / 0,04 |
| Motorlänge (mm) | 30 / 42 |
| Umgebungstemperatur | -20℃ ~ +50℃ |
| Temperaturanstieg | 80.000 Max. |
| Durchschlagsfestigkeit | 1 mA Max. bei 500 V, 1 kHz, 1 Sek. |
| Isolationswiderstand | Mindestens 100 MΩ bei 500 V DC |
Zertifizierungen

Elektrische Parameter:
| Motorgröße | Stromspannung/ Phase (V) | Aktuell/ Phase (A) | Widerstand/ Phase (Ω) | Induktivität/ Phase (mH) | Anzahl Anschlussdrähte | Rotorträgheit (g.cm2) | Haltemoment (Nm) | Motorlänge L (mm) |
| 20 | 2,5 | 0,5 | 5.1 | 1,5 | 4 | 2 | 0,02 | 30 |
| 20 | 6.3 | 0,5 | 12,5 | 4,5 | 4 | 3 | 0,04 | 42 |
Allgemeine technische Parameter:
| Radialspiel | 0,02 mm Max (450 g Last) | Isolationswiderstand | 100 MΩ bei 500 V DC |
| Axiales Spiel | 0,08 mm Max (450 g Last) | Durchschlagsfestigkeit | 500 V AC, 1 mA, 1 s bei 1 kHz |
| Maximale Radiallast | 15N (20 mm von der Flanschoberfläche) | Isolationsklasse | Klasse B (80K) |
| Maximale Axiallast | 5N | Umgebungstemperatur | -20℃ ~ +50℃ |
Schraubenspezifikationen:
| Durchmesser der Leitspindel (mm) | Leitungslänge (mm) | Schritt (mm) | Selbsthemmungskraft bei ausgeschaltetem Strom (N) |
| 3,5 | 0,6096 | 0,003048 | 80 |
| 3,5 | 1 | 0,005 | 40 |
| 3,5 | 2 | 0,01 | 10 |
| 3,5 | 4 | 0,02 | 1 |
| 3,5 | 8 | 0,04 | 0 |
Drehmoment-Frequenz-Kennlinie
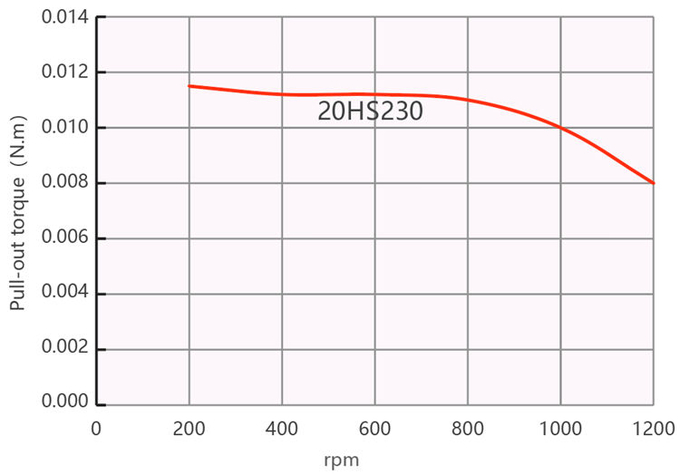
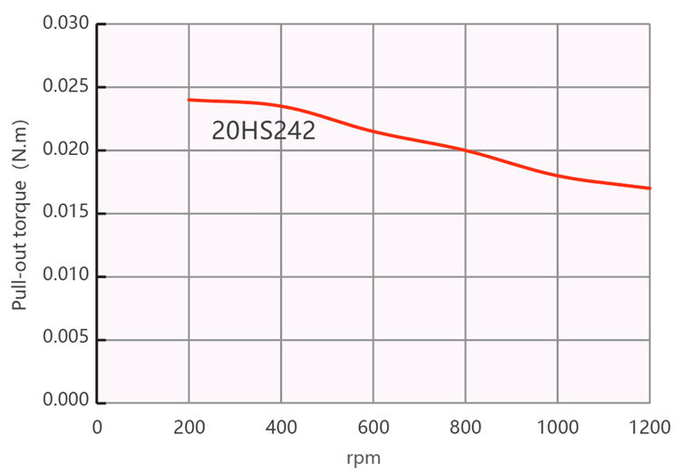
Testbedingungen:
Chopper-Antrieb, Halb-Mikroschrittbetrieb, Ansteuerspannung 24 V
Anwendungsgebiete
3D-Druck:20-mm-Hybrid-Schrittmotoren können zur Bewegungssteuerung in 3D-Druckern verwendet werden, um den Druckkopf, den Tisch und das axiale Bewegungssystem anzutreiben.
Automatisierungsanlagen: Diese Schrittmotoren werden häufig in Automatisierungsanlagen eingesetzt, z. B. in automatischen Verpackungsmaschinen, automatischen Montagelinien, automatischen Handhabungsroboterarmen usw., um präzise Position und Geschwindigkeit zu steuern.
Robotik:Im Bereich der Robotik werden 20-mm-Hybrid-Schrittmotoren zur Steuerung der Gelenkbewegungen von Robotern eingesetzt, um eine präzise Lage- und Positionsregelung zu gewährleisten.
CNC-Werkzeugmaschinen:Diese Schrittmotoren werden auch in CNC-Werkzeugmaschinen eingesetzt, um präzise Bewegungen von Werkzeugen oder Tischen für die hochpräzise Bearbeitung anzutreiben.
Medizinische Geräte:In der Medizintechnik können 20-mm-Hybrid-Schrittmotoren zur präzisen Steuerung der Bewegung von Komponenten in medizinischen Geräten wie Operationsrobotern und Medikamentenverabreichungssystemen eingesetzt werden.
Kfz-Ausrüstung:In der Automobilindustrie können diese Schrittmotoren zur Steuerung der Position und Bewegung von Automobilkomponenten eingesetzt werden, wie z. B. Fensterheber- und -senksysteme, Sitzverstellsysteme usw.
Smart Home:Im Bereich Smart Home können 20-mm-Hybrid-Schrittmotoren zur Steuerung des Öffnens und Schließens von Vorhängen, zum Drehen von Kameras in Heimüberwachungssystemen usw. eingesetzt werden.
Dies sind nur einige der gängigen Anwendungsbereiche von 20-mm-Hybrid-Schrittmotoren. Tatsächlich finden Schrittmotoren in verschiedenen Branchen und Bereichen vielfältige Verwendung. Die jeweiligen Einsatzszenarien hängen zudem von ihren spezifischen Spezifikationen, Leistungs- und Steuerungsanforderungen ab.
Vorteil
Genauigkeit und Positionierungsfähigkeit:Hybrid-Schrittmotoren bieten eine hohe Genauigkeit und Positionierfähigkeit für feine Schrittbewegungen, oft mit niedrigen Schrittwinkeln wie 1,8 Grad oder 0,9 Grad, was zu einer präziseren Positionssteuerung führt.
Hohes Drehmoment und hohe Geschwindigkeit:Hybrid-Schrittmotoren sind so konstruiert, dass sie ein hohes Drehmoment und, mit dem passenden Treiber und Controller, eine hohe Drehzahl liefern. Dadurch eignen sie sich für Anwendungen, die sowohl ein hohes Drehmoment als auch eine hohe Bewegungsgeschwindigkeit erfordern.
Steuerbarkeit und Programmierbarkeit:Hybrid-Schrittmotoren sind ein offenes Regelsystem mit guter Regelbarkeit. Sie können von der Steuerung in jedem Bewegungsschritt präzise angesteuert werden, was zu hochgradig programmierbaren und steuerbaren Bewegungsabläufen führt.
Einfaches Fahren und Steuern:Hybrid-Schrittmotoren verfügen im Vergleich zu anderen Motortypen über eine relativ einfache Ansteuer- und Steuerungselektronik. Sie benötigen keine Positionsrückmeldeeinrichtungen (z. B. Encoder) und können direkt von geeigneten Treibern und Steuerungen angesteuert werden. Dies vereinfacht die Systementwicklung und -installation und senkt die Kosten.
Hohe Zuverlässigkeit und Stabilität:Hybrid-Schrittmotoren bieten dank ihrer einfachen Konstruktion, der geringen Anzahl beweglicher Teile und ihres bürstenlosen Designs hohe Zuverlässigkeit und Stabilität. Sie benötigen keine regelmäßige Wartung, haben eine lange Lebensdauer und bieten bei sachgemäßer Verwendung und Bedienung einen stabilen Betrieb.
Energieeffizient und geräuscharm:Hybrid-Schrittmotoren sind energieeffizient und liefern ein hohes Drehmoment bei relativ geringem Stromverbrauch. Zudem arbeiten sie typischerweise mit niedrigeren Geräuschpegeln, was ihnen in geräuschempfindlichen Anwendungen einen Vorteil verschafft.
Anforderungen an die Motorenauswahl:
►Bewegungs-/Montagerichtung
►Lastanforderungen
►Anforderungen an die Schlaganfallbehandlung
►Anforderungen an die Endbearbeitung
►Präzisionsanforderungen
►Anforderungen an das Encoder-Feedback
►Manuelle Einstellanforderungen
►Umweltanforderungen
Produktionswerkstatt



-300x300.jpg)
-300x300.jpg)
-300x300.jpg)
-300x300.jpg)
-300x300.jpg)