




24V~36V Unterwassermotor, wasserdicht, Schubkraft 7kg~9kg
Beschreibung
Der bürstenlose Unterwassermotor SW4025 ist für 24–36 V Gleichstrom ausgelegt und wurde speziell für Unterwasserdrohnen und -roboter entwickelt. Dieses Modell wird ohne Propeller geliefert; Benutzer können einen eigenen Propeller entwerfen und diesen mit Schrauben befestigen.
Dies ist ein gewöhnlicher bürstenloser Motor, er kann mit jedem gewöhnlichen Drohnen-ESC-Controller oder gewöhnlichen bürstenlosen Motorcontroller angesteuert werden.
Schöne Form, lange Lebensdauer, geräuscharme Technologie, hohe Energieeinsparung, hohes Drehmoment und hohe Präzision.
Es findet breite Anwendung in Präzisionselektronikgeräten, Automatisierungsanlagen, Wasser- und Unterwassergeräten, Modellflugzeugdrohnen und intelligenten Robotern.
Bevor Sie eine Bestellung aufgeben, vergewissern Sie sich bitte, dass Sie in der Lage sind, den Propeller zu konstruieren.
Parameter
| Motortyp | Unterwasser-Bürstenlosmotor |
| Gewicht | 310 g |
| Unterwasserschub | 7 kg bis 9 kg |
| Nennspannung | 24–36 V |
| KV-Wert | 200–300 |
| Entladegeschwindigkeit | 7000 |
| Nennleistung | 450–800 W |
| Laststrom | 15–23 A |
| Nenndrehmoment | 0,9 N*m |
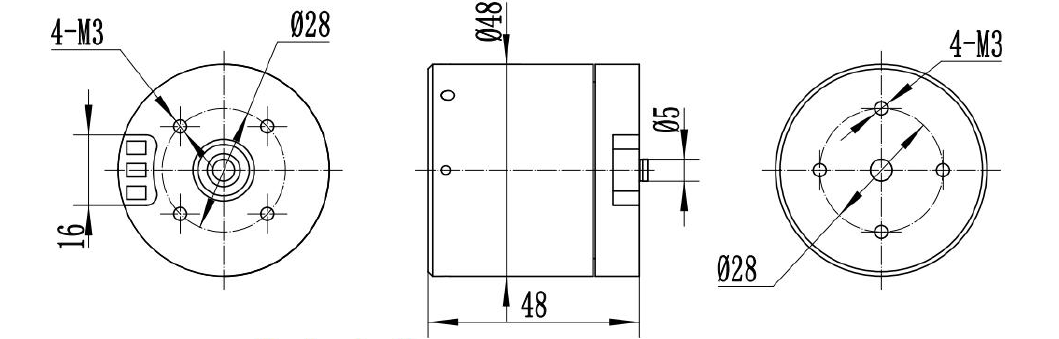
Konstruktionszeichnung: Schraubenlöcher oben zur Befestigung des Propellers
Über Unterwassermotoren
Da bürstenlose Motoren mit elektronischer Kommutierung arbeiten, müssen für den Betrieb bürstenloser Motoren die Motorspannung, die Gleichstromversorgung, der Treiber (ESC) und das Drehzahlregelungssignal angepasst werden.
Nehmen wir als Beispiel einen gängigen Regler (ESC). Trennen Sie zunächst die Stromversorgung, verbinden Sie dann die Motoranschlüsse und die Drehzahlsignalleitung. Stellen Sie den Gashebel auf maximalen Ausschlag (volle Tastrate). Schließen Sie den Regler wieder an die Stromversorgung an. Sie hören zwei kurze „Drop“-Geräusche. Der Gashebel bewegt sich schnell in die unterste Position, und Sie hören das typische „Drop ---- Drop“-Geräusch beim Motorstart. Die Kalibrierung des Gashebelwegs ist abgeschlossen, und Sie können den Motor normal starten. (Die Funktionsweise von Reglern kann je nach Hersteller variieren. Bitte konsultieren Sie die Bedienungsanleitung des jeweiligen Reglermodells oder wenden Sie sich für weitere Informationen an den Reglerhersteller.)
Kunden können einen herkömmlichen Drohnen-ESC (elektrischer Drehzahlregler) verwenden, um diesen Motor anzusteuern.
Wir produzieren ausschließlich Motoren und bieten keine Regler an.
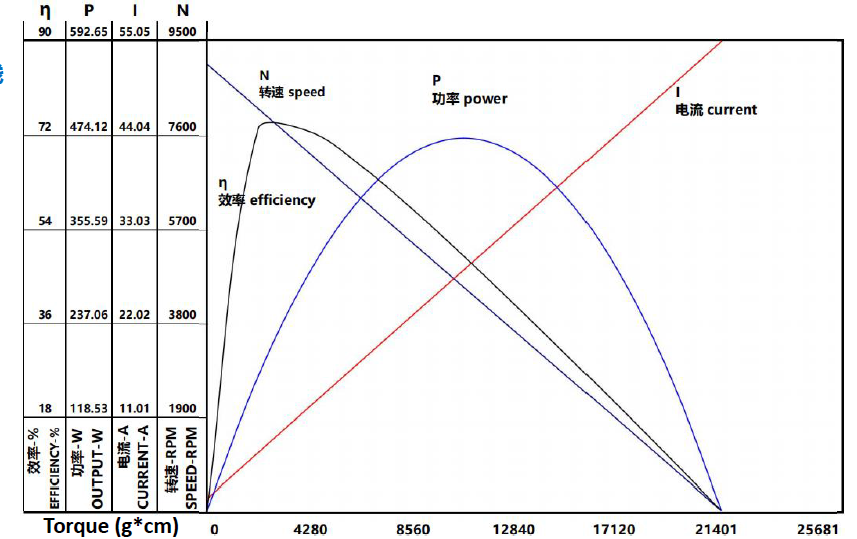
Leistungskennlinie des Motors SW2216 (16 V, 550 kV)
Vorteile von Unterwassermotoren
1. Wasserdicht und feuchtigkeitsbeständig, um Kurzschlüsse der elektrischen Bauteile im Inneren der Kammer zu vermeiden.
2. Wirksame Abschirmung gegen Staub und Partikel zur Vermeidung von Lagerverschleiß.
3. Halten Sie den Hohlraum trocken, um Korrosion und Oxidation des Motors und des Antriebs zu vermeiden, was zu schlechtem Kontakt oder Leckagen führen kann.
Anwendungen
●Elektronisches Präzisionsinstrument
●Automatisierungsanlagen
●Unterwasserausrüstung
●Flugzeugmodell Drohne
●Intelligenter Roboter
Ausgabeachse
1. Verdrahtungsmethode
Zunächst müssen Motor, Netzteil und Regler (ESC) sorgfältig entsprechend der Last und den Einsatzbedingungen ausgewählt werden. Eine zu hohe Netzteilspannung kann Motor und Regler beschädigen, während eine zu geringe Entladeleistung des Netzteils die Nennleistung des Motors beeinträchtigt. Die Reglerwahl muss ebenfalls auf die Nennspannung des Motors abgestimmt sein. Die Motorbefestigungsschrauben dürfen nicht zu lang sein, um die Motorspule nicht zu beschädigen. Vor dem Verdrahten muss aus Sicherheitsgründen die Motorlast entfernt werden. Verbinden Sie zuerst die drei Leitungen von Regler und Motor (zwei davon können vertauscht werden, um die Drehrichtung des Motors zu ändern). Schließen Sie anschließend die Signalleitung des Reglers an. Achten Sie dabei auf die korrekte Reihenfolge der Signalleitungen und vermeiden Sie Verpolung. Schließen Sie abschließend das Gleichstromnetzteil an. Die Polarität darf nicht vertauscht werden. Die meisten Regler verfügen über einen Verpolungsschutz. Regler ohne Verpolungsschutz können durchbrennen, wenn sie mit der falschen Polarität an das Netzteil angeschlossen werden.
2. Kalibrierung des Gaswegs.
Bei erstmaliger Verwendung des Reglers, beim Wechsel der PWM-Signalquelle oder bei längerer Verwendung eines nicht kalibrierten Gassignals muss der Gasweg kalibriert werden.
Lieferzeit- und Verpackungsinformationen
Lieferzeit für Muster:
Standardmotoren ab Lager: innerhalb von 3 Tagen
Standardmotoren nicht auf Lager: Lieferzeit 15 Tage
Kundenspezifische Produkte: Ca. 25–30 Tage (abhängig vom Aufwand der Anpassung)
Vorlaufzeit für die Herstellung einer neuen Form: in der Regel etwa 45 Tage
Lieferzeit für die Massenproduktion: abhängig von der Bestellmenge
Verpackung
Die Proben werden in Schaumstoffpolsterung und einem Karton verpackt und per Expressversand verschickt.
Serienfertigung, die Motoren werden in Wellpappkartons mit transparenter Außenfolie verpackt. (Versand per Luftfracht)
Bei Versand per Seefracht werden die Produkte auf Paletten verpackt.

Verpackung, Liefermethode und Lieferzeit
| DHL | 3-5 Werktage |
| UPS | 5-7 Werktage |
| TNT | 5-7 Werktage |
| FedEx | 7-9 Werktage |
| Rettungsdienst | 12-15 Werktage |
| China Post | Hängt davon ab, in welches Land das Schiff fährt. |
| Meer | Hängt davon ab, in welches Land das Schiff fährt. |

Zahlungsmethode
| Zahlungsmethode | Mastercard | Visum | elektronisches Checking | SPÄTER BEZAHLEN | T/T | PayPal |
| Lieferzeit für Musterbestellungen | etwa 15 Tage | |||||
| Lieferzeit für Großbestellungen | 25-30 Tage | |||||
| Produktqualitätsgarantie | 12 Monate | |||||
| Verpackung | Einzelverpackung im Karton, 500 Stück pro Karton. | |||||
Senden Sie uns Ihre Nachricht:
Produktkategorien
-

Geräuscharmer, hochwertiger 3,3-V-6-mm-Mikroschrittmotor...
-

M3-Gewindespindel, 2-phasig, 10 mm Mini-Getriebe, Stufenschaltung...
-

N20 Gleichstrom-Bürstenmotor mit 1024 Getriebe, Ausgang ...
-

Hochpräziser 42-mm-Schrittmotor NEMA 17 Hybrid...
-

Geräuscharmer Permanentmagnet-Schrittmotor mit 50 mm Durchmesser...
-

Drehmomentstarker NEMA 23 Hybrid-Schrittmotor 57 mm m...